[4.6]-AutoSAR零基础学习-CAN通信协议
最后更新:2022-05-11 13:07:47 手机定位技术交流文章
目录
1 概述
2 流程
2.1 接收流程
2.2 发送流程
2.3 确认服务
在通信结构的框架内,已经对自动SAR通信模块,特别是信号接收进行了全面研究,本节将通过详细介绍CAN通信示例,对自动SAR通信模块产生进一步印象!
1 概述
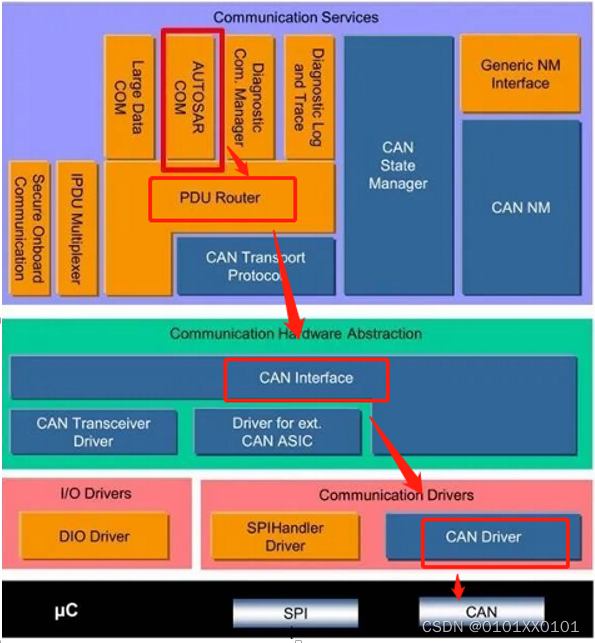
CAN通讯的主要组成部分有四个:COM、PDU路由器、Can接口和Can司机。
能够传递必要文件
2 流程
2.1 接收流程
根据ISO 11898-1标准,CAN接收功能需要使用通知服务;如何利用AUTOSAR结构完成这项工作?以下流程图描述了从AUTOSAR结构接收软件的CA: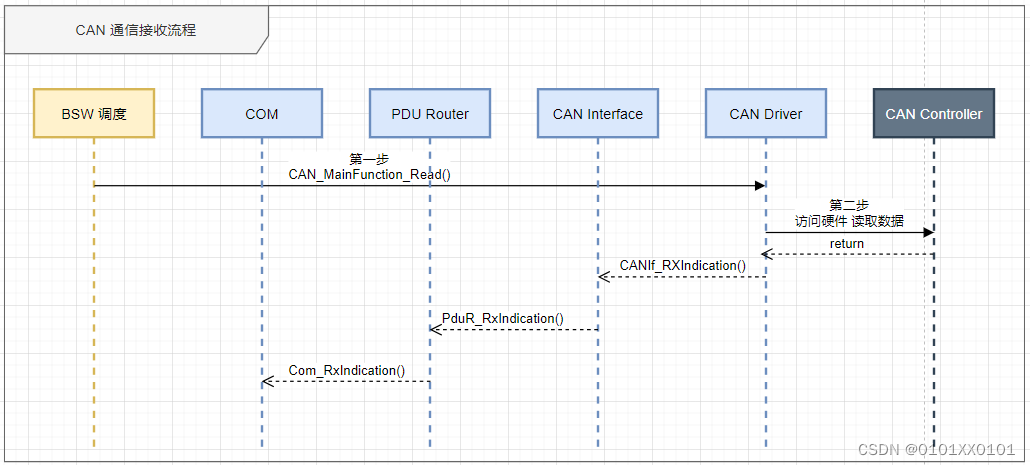
1 Can-Driver模块的周期性 BSW 调度器呼叫 Can_MainFunction_Read 函数;
CanDriver 模块的 Can_MainFunction_Read 函数将读取 CanCanCancurrent (硬件) 登记册 。如前所述,在仲裁登记条款中,数据长度登记册和数据登记册并读取这些发报机的数据(ISO 11898-1标准界定了LLC数据框架的格式(ID),数据长度和数据第3节),当然,根据适当的芯片手册中的定义,必须接触其他储户。最后,数据存取的合法性得到保证。);
3 阅读数据后,再次调用 Can界面模块的 CanIf_Rxindication 函数,将数据从 Can 驱动器模块转到 Can 界面模块的前一级。
4 Can界面模块再次援引PduR模块的 PduR_Rxindication 函数,将数据传送到 PduR模块。
PduR 模块与 Com 模块连接, Com 模块运行 Com_Rxindication 函数, 将数据发送到 Com 模块, 该模块将数据存储在缓存中, 并提供层软件供阅读和使用 。
2.2 发送流程
如下文AUTOSAR框架的两个数字所示,CAN传送功能需要请求和确认服务。
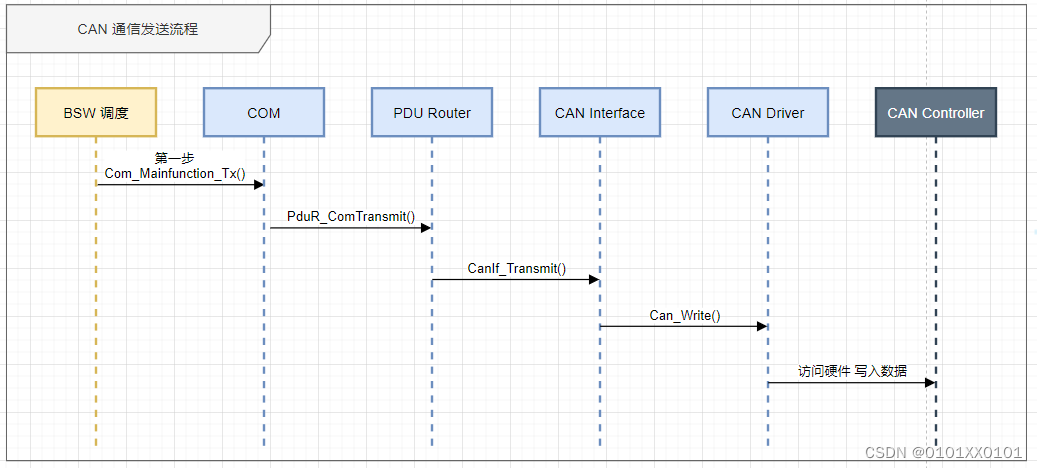
1 BSW 调度器通过 Com 模块的 Com_MainFunction_Tx 函数循环,该函数读取从缓存发送的数据 。
Com_MainFunction_Tx 函数的逗号调用 PduR_Commission 函数, 并将数据发送到 PduR 模块 。
3个PduR模块通往Can界面的路径,使用 Canif_ Transmission 函数将数据从PduR模块发送到下CAN界面模块;
4 Can界面模块再次援引Can驱动器模块的Can_write功能,将数据写入相关登记册。
Can_write 函数与 CAN 接收功能一样,在写入数据之前将访问仲裁、数据长度和数据储存库。
2.3 确认服务
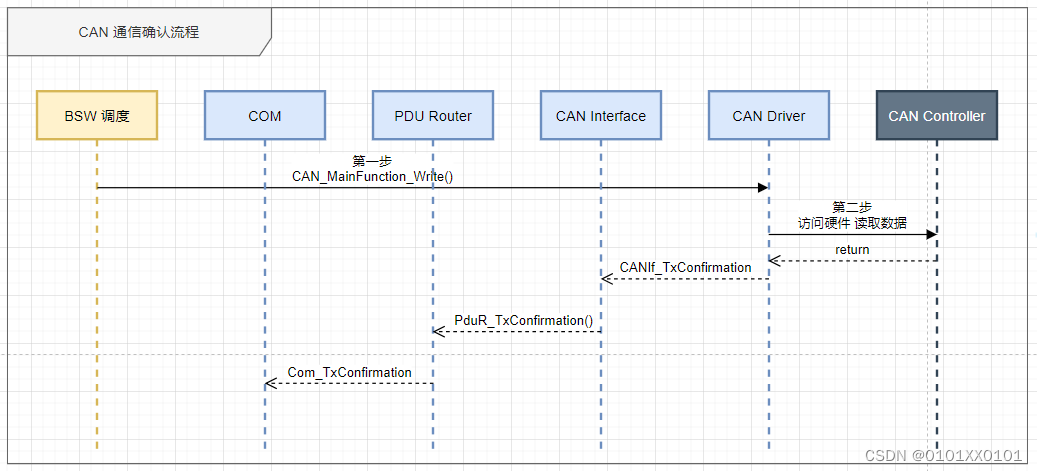
1 周期性 BSW 调度器呼叫 Can-Driver 模块的 Can_MainFunction_Write 函数;
2 CanDriver 模块的 Can_MainFunction_Write 函数将访问CanCanCanCancurrent(硬件)的相关保存者,阅读数据供确认;
3 在读取数据后,继续调用CanIf_TxComference 模块的 CanIf_TxComference 功能,以便数据从 Can驱动器模块传输到更高的 Can界面模块。
4 Can界面模块再次援引PduR模块的 PduR_TxConformat 函数,将数据传送到 PduR模块。
5 PduR 模块连接到 Com 模块。 要确认传输状态, 请使用 Com_ TxConform 函数 。
=>总目录<=
本文由 在线网速测试 整理编辑,转载请注明出处。

