Proteus Arduino 模拟——两架Arduino在RS485号卫星上进行互动。
最后更新:2021-10-22 02:08:38 手机定位技术交流文章
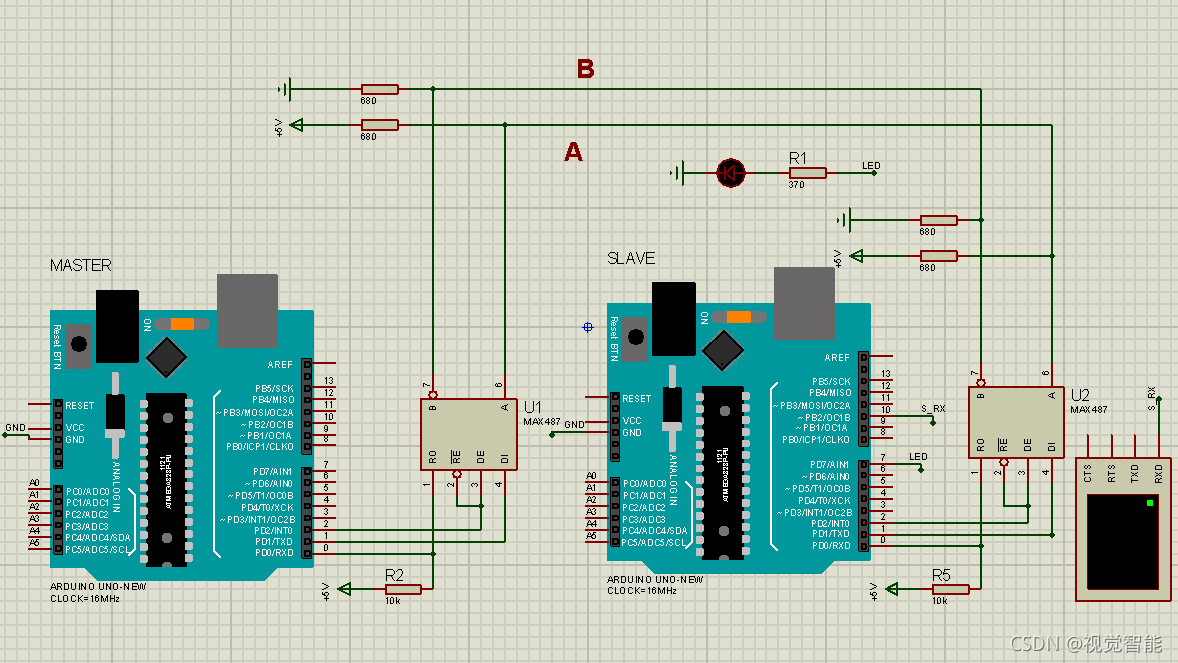
两个Arduinos通过RS485电缆通信。
1. 《RS 485通信协定》概览
RS485系列通信协议可在4 000米(4公里)的距离内发送数字序列数据,然而,在1 200米之后,信号开始减少,信号广播开始失去强度,因此数据损失的风险最小,为了确保成功传输4公里数据,承运人的介质必须平稳,A线和B线的长度必须相等,外部EMF(电力)也可能对数据接线产生影响。
RS 485在两条称为A线和B线的不同电缆上发出两个单独的信号。 由于脉冲的两极性( 90度相隔), 它们可能走得很远 。 传输信号是两极化的, 沿路接收的任何外部传感器信号都可以在输出时随时过滤 。
由于微控制器不能出口,RS 485信号涉及数据。要建立 RS 485 通信,外部设备/模块必须与微控制器接口。 Max 487是一个受欢迎的RS 487收发器,可以与任何RS 485微控制器互动。 Max 487从微控制器收到数据。 然后,在 RS 485 线上, Max 487 传输数据。
2. Max 487提供了导言。
最大487号是RS-485和RS-422通信的低容量收发机,由两部分组成:驱动器和接收器。MAX487号包括一个降低压力率的驱动器,它消除了EMI和由故障端对端连接产生的反射,导致无过失数据传输率高达250千位/秒。
无论是卸载还是完全装载,这些发件人都使用120毫A至500毫A的电流。 此外,MAX 487包括一种低强度的停机模式,耗用仅为0.1米A。 所有部件都用单一的5V电源供电。
短路电流限制驱动器和热关机电路通过将驱动器输出置于高抗力状态来防止过度电流消耗。 接收器输入包括一个故障安全功能, 确保在输入打开时有符合逻辑的高输出。 MAX487大客车支持多达128个MAX487收发器,并有一个四分之一单位负载接收器输入阻力。 MAX487 用于半长期应用。
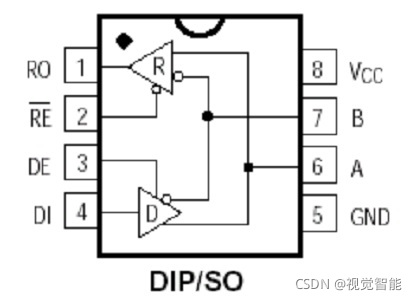
马克斯487的上岗职务如下:
| 引脚诒 | 功能 |
|---|---|
| 1 | RO 代表收件人输出 。 |
| 2 | RE 代表已启用的收件人 。 |
| 3 | - 能够发射,在低水平有效 |
| 4 | DI代表发射器输入 |
| 5 | GND - 接地 |
| 6 | - 接收器输入和驱动器输出同步。 |
| 7 | B - 倒转接收器输入和输出驱动 |
| 8 | 电源供应Vcc - +5V |
3、仿真电路原理图
4、仿真代码实现
本样本使用开放源 RS485 通信: AndroidRS485
1)数据发送端
2)数据接收端
5、仿真结果
本文由 在线网速测试 整理编辑,转载请注明出处。

