Copek机器人 TCP 通信(机器人充当服务器)
- I. 对机器人控制端IP地址的更改
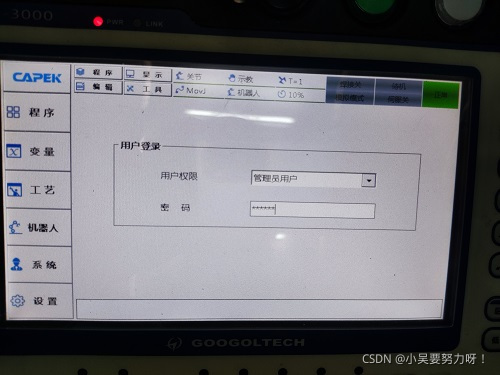
- 一. 点击系统**,访问管理**,然后在用户登录界面输入密码。
- 同时,按下图中显示的“above”,锁定,清除**,接口开关。
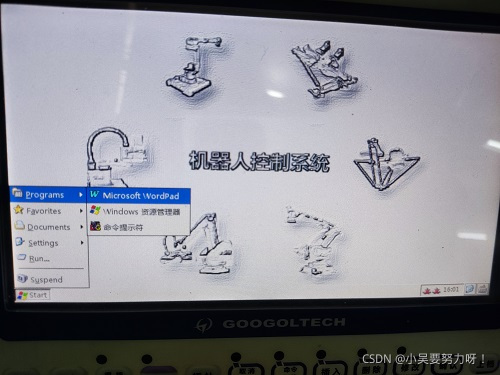
- 三. 在左下角创建启动控制器, 然后选择 ** 程序** 和 ** 窗口资源管理器** 。
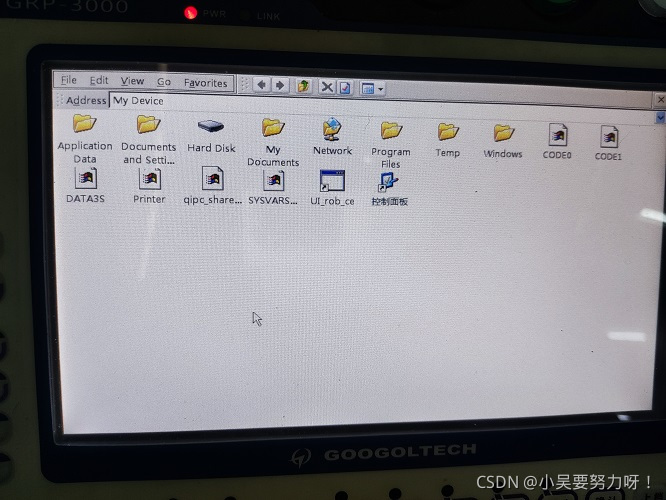
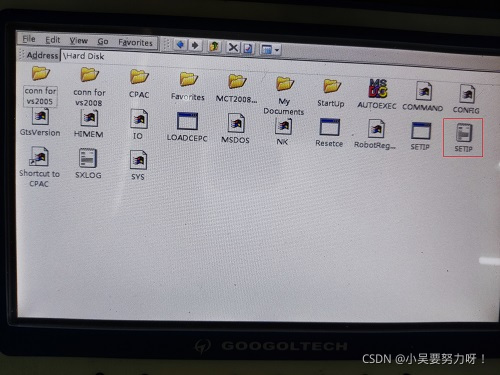
- 四. 双击硬盘(硬盘),选择硬盘(硬盘)。
- 五. 编辑文件,双击 SETI。
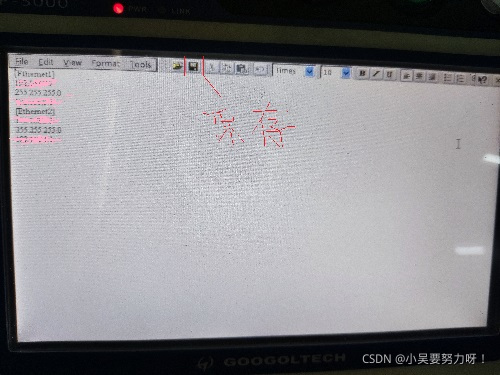
- 六。更新 IP 地址后, 请单击以保存 。
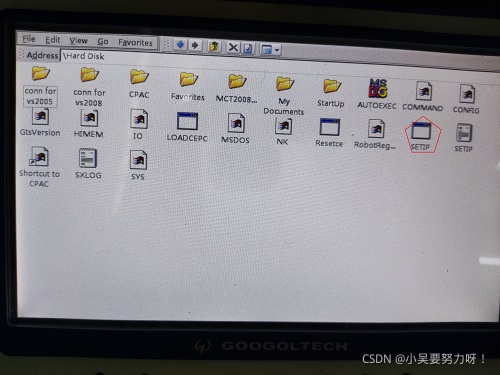
- 七. 要运行一个程序, 双击 SETI, 以图表中的红色标记表示 。
- 二、通信设置
- 一. 连接PC终端网络接口与机器人的局域网港口。
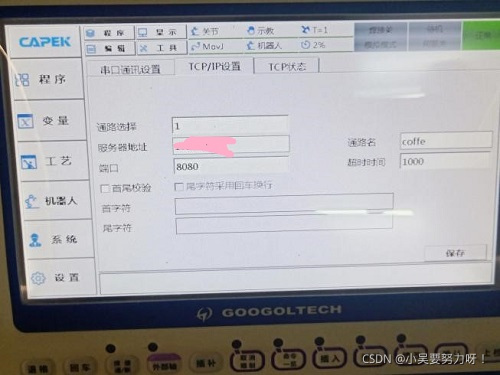
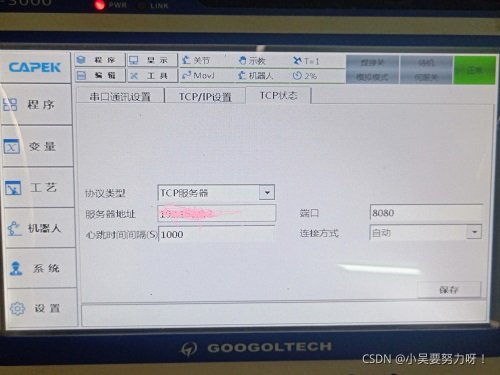
- 二. 设置机器人IP地址等等
- 3. 编写代码
- 四. 启动回放和服务器后, 按下绿色运行键 。
- 总结
最后更新:2021-11-19 17:46:39 手机定位技术交流文章
文章目录
I. 对机器人控制端IP地址的更改
一. 按此顺序点击用户登录窗口的系统、访问管理和输入密码。
如图所示,同时按住顶部、锁和清晰的接口开关。
三. 在左下角创建启动控制, 然后选择应用程序和 Windows 资源管理器 。
四. 双击硬盘(硬盘),选择硬盘(硬盘)。
五. 编辑文件,双击 SETI。
六。更新 IP 地址后, 请单击以保存 。
七. 要运行一个程序, 双击 SETI, 以图表中的红色标记表示 。
二、通信设置
一. 连接PC终端网络接口与机器人的局域网港口。
应当指出,PC网络端口的IP地址应与机器人网络端口的前三个相同。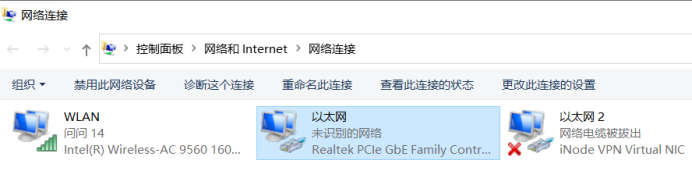
二. 设置机器人IP地址等等
3. 编写代码
四. 启动回放和服务器后, 按下绿色运行键 。
总结
如下文所示,TCP控制可用于进一步促进Copek机器人与PC机之间的数据流动。
本文由 在线网速测试 整理编辑,转载请注明出处。

