CAN 公共汽车上的扫盲
- can是什么
- can的作用
- can的优点
- can总线拓扑
- can控制器
- can收发器
- 物理层特性
- 终端电阻
- can的特点
- 多主控制
- 消息发送
- 通信速度
- 远程数据请求
- 错误
- 故障封闭
- 连接节点多
- 速度快,距离远
- can总线错误
- 主动错误状态
- 被动错误状态
- 总线关闭状态
- 状态转换
- 错误计数
- can协议
- 模型
- 标准规格
- ISO标准
- 面向汽车的协议分类
- can帧协议
- 帧(can2.0)
- 数据帧
- 远程帧
- 错误帧
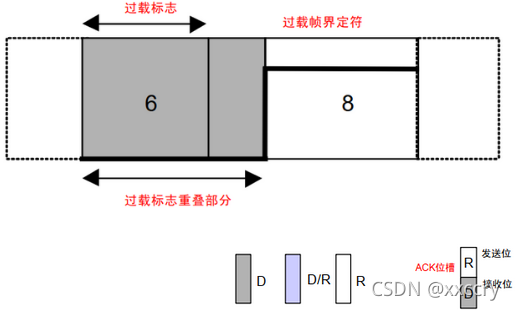
- 过载帧
- 帧间隔
- 帧(can fd)
- 仲裁
- 位填充
- 错误
- 错误的种类
- 错误帧输出
- 位时序
- 硬件同步
- 再同步
- 调整同步的规则
- 降低成本:由于欧洲海关单位通过单独的CAN系统进行通信,错误、权重、连接和价格降低。
- 完全集中:CAN总线提供了一个接入点,可以连接所有网络ECU和可靠的信息传输。
- 稳定:CAN具有很强的抵御电动和电磁干扰的复原力,使它非常适合严格的安全需要。
- 效率:CAN框架按身份识别排列优先次序,最高优先数据在不干扰其他框架的情况下即刻进入公交车。
- 接收收发器数据,处理并传送到CPU
- 从 CPU 获取命令数据并将其传输到 CAN 收发器 。
- 接受 CAN 公共汽车上的差分数据, 将其转换为 TTL, 并交付给控制器 。
- 将CAN控制器的TTL平坦信号转换为差分信号,并传送到公共汽车上。
- 随着公交车的到来,所有单位都可以开始传送信息(多主控制)。
- 进入公共汽车的第一个模块被授予发送能力( CASMA/ CA 模式)。
- 当许多单位同时开始传送高优先身份信息时,发送高优先身份信息的单位有权发送。
- 错误检测功能:所有设备都能够检测错误。
- 错误通知功能:当发现错误时,将立即通知所有其他单位。
- 错误恢复功能:如果在发送信件的单位中发现错误,则当前 sstop 将被迫终止。强制到终端的单位将重复重复此信件,直到成功传输为止。
- 为了避免干扰其他单位的通信,虽然收到错误通知,但无法积极发送。
- 即使发现一个问题,并且没有发现更多单位处于主动误差状态,整个公共汽车被认为是无误的。
- 发送后立即恢复发送是不可行的,因此“延迟传输”必须在下次发送前的间隔时间内(连续八个隐藏地点)输入。
- LLC:主要用于接收信息过滤器、超载通知和错误回收。
- MAC:主要在Can控制硬件中实施数据封装/拆解、框架编码、媒体访问管理、错误检测/通知和反应。
- PLS主要涉及比特编码/解码、时间档时间和同步(与同步的第SS段相一致)。
- PMA: 输电传输器电气特性
- CAN是ISO 11898。高速现在,由于通过了其他立法,ISO 11898现在改名为ISO 11898-1。
- CAN是ISO 11519。低速目前,ISO 11519-2是ISO 11519-1的修订版。
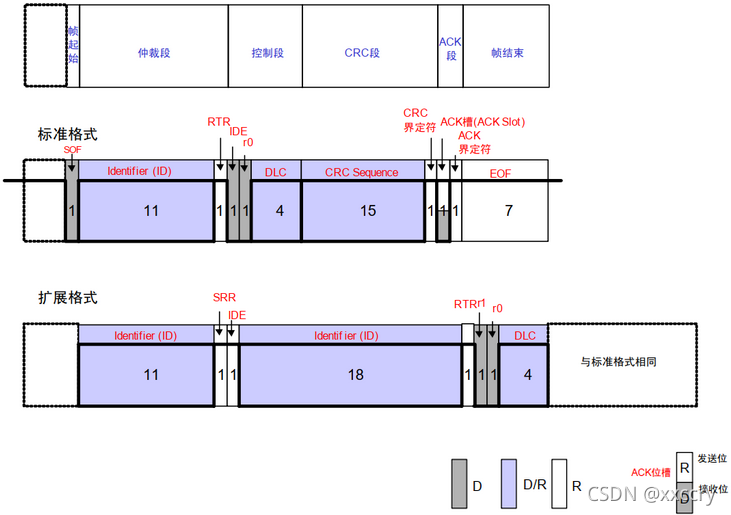
- 框架启动: 框架启动部分有一个主导位置 。
- 指明数据优先顺序的段落称为仲裁段落。禁止高7位均为隐形
RTR用于确定一个框架是数据框架还是远程框架(0-数据框架/1-远程框架)。
标准框架的仲裁段落和延长框架各有不同:(扩展框架)IDE选择识别标志位置(0个使用标准识别标志/1,使用扩展识别标志),SRR取代远程请求时段(隐藏),后者取代标准框架中的RTR。 - 控制段:6位数构成,以字节提供数据字段。
保留点R0和r1(扩展框架R1和标准框架IDE)必须在可见水平上提供,而接收单位可以得到任何水平。 DLC是数据长度代码。 - 数据字段:数据字段,有1-8字节,从MSB开始。
- 使用 15 位 CRC 序列和 1 位 CRC 定义(用于分离)
CRC的计算包括框架起算、仲裁、控制和数据部分,当接收单位不连贯地计算CRC值时,就会指出缺陷。 - ACK 图:确认一个ACK槽和一个ACK分隔器的正确框架收据。
当接收单位被适当接收到活动框架时,一个可见位置被传送到ACK槽中的传输通单元,在公共汽车上关闭的接收单位或不活动接收单位不返回ACK。 - 框架结束:表示框架结束的部分由七个隐藏地点组成。
- 远程框架既有常规的,也有扩大的。
- 远程帧没有数据段,然而,它与缺乏数据部分的数据框架不同。
- 仲裁部分的RTR将远程框架与数据框架区分开来,远程框架DLC可能具有任何价值(DLC)。这一点不确定)
- 无法进入数据框架以便每个模块定期确认/答复每个模块中的定期连接/答复,或仲裁段落包括大量信息的情况
- 运行中错误符号的 6 个可见位置
- 被动错误指示器的六个隐藏地点
- 错误限制: 8 个隐藏位置
- 主要标志:6个可观测地点
- 负担过重的分隔符:8个隐藏位置
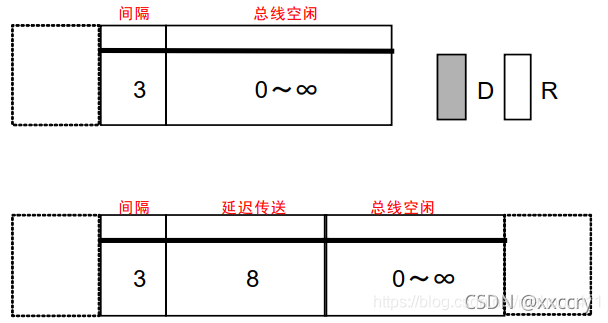
- 间隔:3个隐性位
- 免费公交车:隐藏关卡,无长度限制( 0 也可以) 被视为免费,要发送的单位可以开始使用公交车。
- 延迟传输( 发送暂停 ) : 8个隐藏的空位, 紧接在单位在被动错误状态下刚刚发送信件后的框架间隔 。
- 当公交车免费时,首先发送信息单位有权发送信息。
- 当许多单位开始同时发送时,这些单位在仲裁部分开始时开始仲裁,最连续生产可见电平的单位可以继续传送,仲裁失败的下一个单位开始转移到接收单位。
- 由于框架仲裁会议中上一次的RTR是明确的,因此数据框架和具有同一身份的远程框架具有优先地位。
- 在框架仲裁一节中,使用标准框架和扩展框架,优先使用投资促进投资管理局。
- 在提供数据框架/远程框架时,在SOF-CRC之间发送单位数据,如果持续5比特,同样水平的公寓。插入前五大对立面之一。
- 在接收数据框架/远程框架时,如果最后5位数相同,SOF-CRC之间在同一公寓之间的数据,如果最后5位数相同,如果下一个级别与前5位数相同,则将被视为错误,如果需要,将传送错误框架。删除这一位再接收
- 位错误
- 将数据框架导出到总线/远程框架/传感器框架/超载框架并产生ACK/错误单位检测比特错误的单位。
- 在仲裁部分出口隐蔽电平层,如果查明可见电平层,将被视为仲裁失败,而不是失误。
- 当仲裁会议期间发现作为填补空位的隐藏电位输出时,该输出被视为填充错误而不是小错误。 ]
- 在 ACK 中传输隐藏的级别单位输出, 但如果检测到可见的级别, ACK 响应将被解读为其它单位, 而不是小错误 。
- 生成一个被动错误符号( 六个隐藏位置), 但如果发现可见电子, 则会遵守错误符号的末端条件, 并检测到六个连续的固定位置, 但不认为错误识别了被动错误符号( 六个隐藏位置), 但如果发现一个可见电子, 则会遵守错误符号的末端条件, 并检测到六个连续的固定位置, 但不认为错误 。
- 格式错误
- 接收单位确定EOF(在七个隐蔽地点中的第八位)为主导级别,这不被视为正式错误。
- 如果接收设备检测到数据长度代码(DLC)中的9:15值,则也不视为格式错误。
- 识别符合错误标准的单元格。输出框中的通信错误
- 活动错误标记是在活动错误状态下单元格输出的错误框架;被动错误标记是在活动错误状态下单位输出的错误框架。
- 再次传送单位的错误框架、数据框架或远程框架。
- 所有错误均按ACK定义的下列错误确认,但下一个ACK定义的CRC错误除外。
- 在一个地点同步
- 只有线条在最后试样点之后的值与边缘之后的线条值不同时,才能用边缘来改变同步。
- 当公交车是免费的,且在可见水平边缘有隐含水平时,硬件是同步的。
- 如果符合要求1和要求2,在公共汽车不能自由到达表面水平边缘时查明的隐藏电量将重新同步。
- 发送单位检测视觉水平输出的延迟, 不同步 。
- 当许多单位同时从框架转至仲裁会议时,发送单位不会同步拖延。
- Huwa Qing Xian 中心, 综合CAN 公共汽车入口( 底部的详情) 。 我很抱歉, Bilililili。 这篇文章是我们特别报导全球之声Online.com/ read/ cv8775991的一部分。
- 吮指原味张.面对初学者的CAN总线入门教程(一)_CAN总线宏观介绍. https://blog.csdn.net/mahoon411/article/details/109739994?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522162985842216780261930944%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=162985842216780261930944&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2 blogfirst_rank_v2~rank_v29-1-109739994.pc_v2_rank_blog_default&utm_term=can&spm=1018.2226.3001.4450
- 吮指原味张.面对初学者的CAN总线入门教程(二)_CAN协议基本概念及其规格标准. https://blog.csdn.net/mahoon411/article/details/109752223?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163843578416780265467612%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=163843578416780265467612&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2 blogfirst_rank_v2~rank_v29-2-109752223.pc_v2_rank_blog_default&utm_term=can&spm=1018.2226.3001.4450
- 吮指原味张.面对初学者的CAN总线入门教程(三)_CAN通信中帧、优先级、位填充、错误、位时序以及同步的介绍. https://blog.csdn.net/mahoon411/article/details/109779325?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163843578416780265467612%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fblog.%2522%257D&request_id=163843578416780265467612&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2 blogfirst_rank_v2~rank_v29-3-109779325.pc_v2_rank_blog_default&utm_term=can&spm=1018.2226.3001.4450
最后更新:2021-12-03 23:37:16 手机定位技术交流文章
can总线
can是什么
CAN是主计长地区网络的缩略语,是一个系列通信网络,能够成功地进行分散或实时控制,最初是由德国BOSCH公司创建的,该公司以汽车电子研究与开发著称,1986年创建了汽车导向的CAN通信协议,后来由ISO 11898和ISO 11595标准化,目前是欧洲车辆网络的标准协议。
can的作用
CAN公共汽车的工作是将不同的部件连接起来,这些部件随后要遵守同样的一套标准协议,其好处是高度兼容性、准确的信息传输以及整个车辆的电线束减少。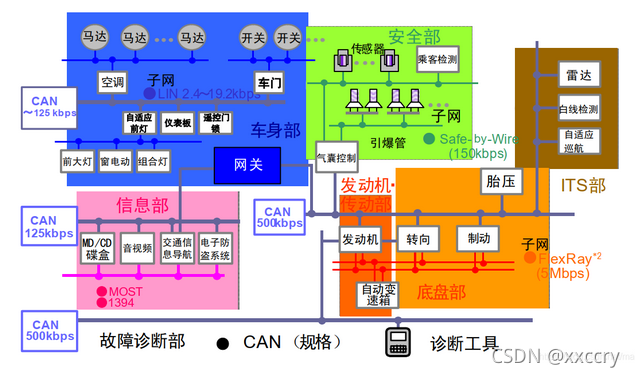
can的优点
can总线拓扑
CAN总线图如下: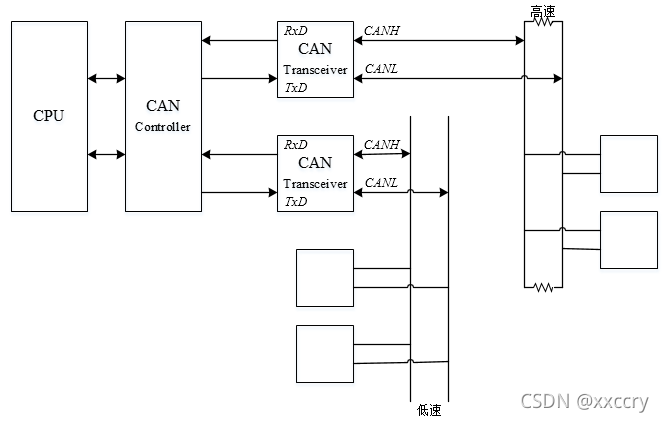
can控制器
can收发器
物理层特性
公共汽车水平由CAN收发机根据CANH和CANL之间的差别确定,有两种公共汽车水平:主导水平和隐藏水平。
Can2. 主线设为0,值如下: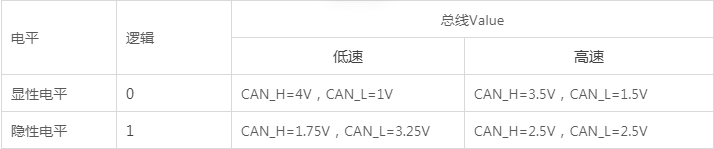
显性电平具有优先权,只要有一个单元输出显性电平,总线上即为显性电平(0&1)。而隐形电平则具有包容性,只有所有的单元都输出隐性电平,总线上才为隐性电平(0&0)。
终端电阻
当播放高频(高速)信号时,信号波长相对于传输线相对较短,传输线终端的信号形成反射波,中断最初的信号,使传输线的终点在传输线的尽头被阻断,信号不会反射。
CAN公共汽车两端的终端抗药性应与对通信电缆的抗药性相同,典型值为120(不一定是120),用于匹配公共汽车抗药性,提高数据通信的抗药性和可靠性。
can的特点
多主控制
消息发送
CAN 协议中的所有信件都以预设格式发送。当总线为免费时,所有连接到总线的单位都可以开始发送新信件。当两个以上的单位同时开始发送信件时,优先级根据 ID 确定。ID表示给公共汽车的电文优先,而不是发送的预定地址。当两个或两个以上的单位同时开始发送信息时,每个电文识别码将逐案比较。 赢得仲裁的单位(被确定为最高优先)可以继续发送信息,但仲裁失败的单位则立即停止发送接收。
由于没有“地址”可比信息,在公共汽车上添加模块不需要更改与公共汽车连接的其他单位的硬件或应用层。
通信速度
同一个网络中的所有单位都必须以一致的通信速度配置。 如果一个单位的通信速度与其他单位的通信速度不同,它会产生错误的信号,导致整个网络的通信受损。
各种网络可以以不同速度进行交流。
远程数据请求
发送“ 远程框架”, 要求将数据传送到其它单位 。
错误
故障封闭
如果问题在于公共汽车上的暂时数据错误(如外部噪音等)或长期数据错误(如单位内的故障、驱动器故障、断开等)。 当公共汽车上发生连续数据错误时,造成故障的单位可以与公共汽车断开(断开)。
连接节点多
Can bus 是一个可以同时连接多个单位的公共汽车。 连接单位的总数可能是无限的。
然而,在现实中,可以连接的细胞数量因公共汽车和电力载荷的延误而受到限制,可以连接的单元数量因通信速度下降而增加;可以连接的单元数量因通信速度提高而减少。
速度快,距离远

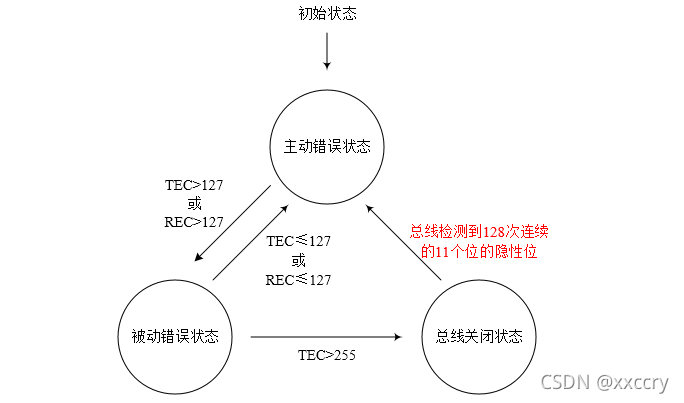
can总线错误
主动错误状态
主动错误状态是可以正常参加总线通信当发现错误时,此状态中的单元格会释放活动错误标记。
被动错误状态
被动错误状态是一个容易造成错误的条件。 当识别错误时, 单位输出被动错误标记, 但是 :
总线关闭状态
公共汽车停机状态是该单位无法参与公共汽车交通的一个状况,在该州的单位禁止接收和传递信息。
状态转换
上述状态是通过发送和接收错误计数来处理的,这些计数根据数值的数量界定条目状态。以下是错误状态和计数之间的关系: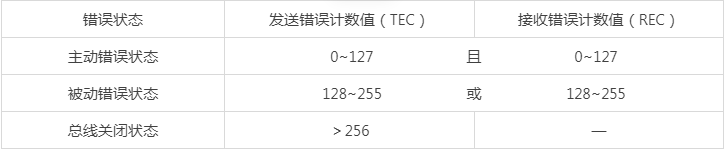
错误计数
误算值因情况不同而不同,接收/传输单一数据框架可满足若干条件。错误计数器开始计数出错标记的首次发生时: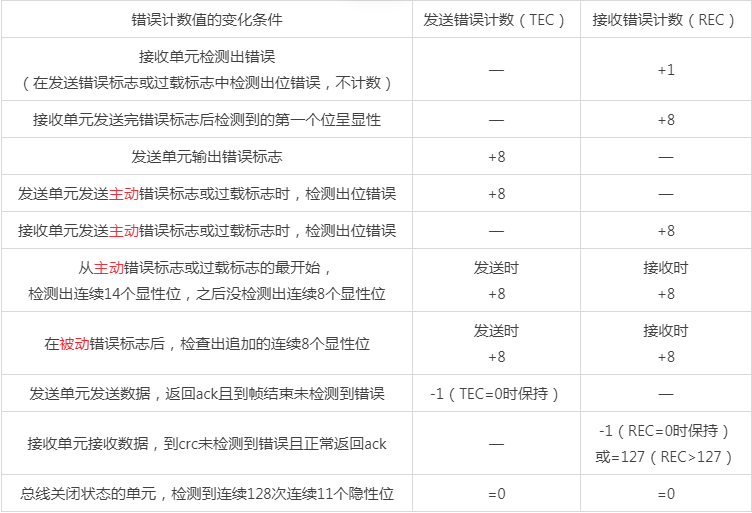
can协议
模型
在OSI基本参考模型中,CAN协议包括传输层、数据链接层和物理层: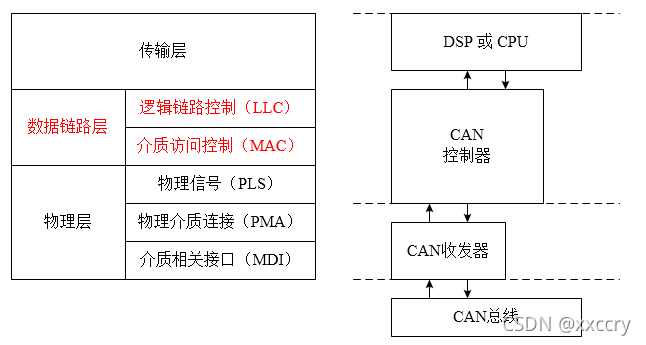
标准规格
ISO标准
CAAN现在载有ISO 11898和ISO 11519,它们与数据链层一样具体,尽管物理层不同:
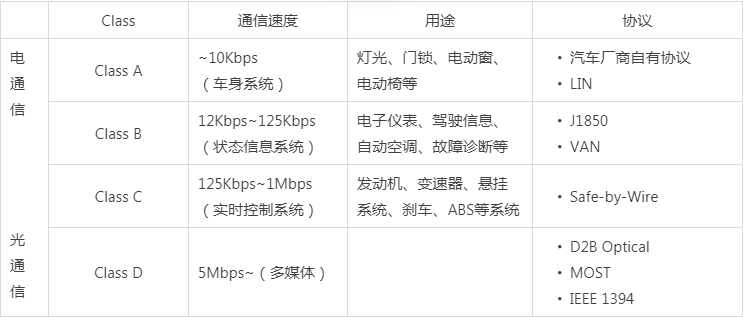
面向汽车的协议分类
can帧协议
注:在本节中,D代表电解管的主导水平,R代表电解管的无形水平。
帧(can2.0)
CAN 使用四种不同的框架进行通信: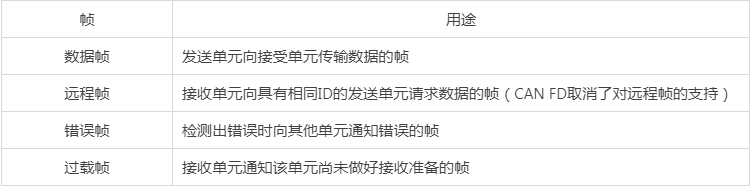
数据帧
数据框架分为标准框架和延长框架,标准框架有11个ID,延长框架有29个ID。
常规数据框架的长度为51 + (0-64) = (51-117) 比特。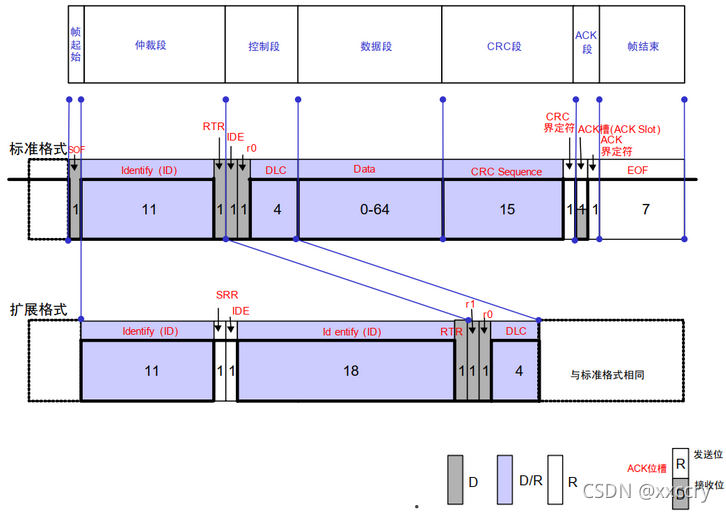
远程帧
错误帧
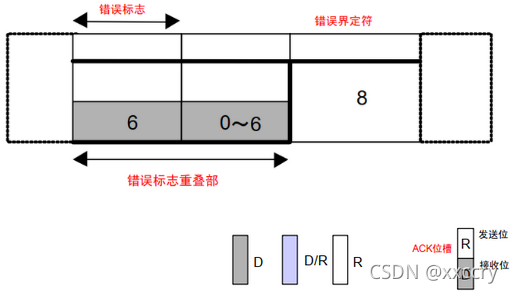
错误符号和错误分隔符包含接收和发送信件时发现的错误通知错误框架:
过载帧
接收单位告知其尚未完成接收准备的框架,包括超载信号和超载分隔符:
帧间隔
通过在数据框架和远程框架之间插入框,将数据框架和远程框架之间的框架分隔开来。数据框架和远程框架与前面的任何框架(数据框架/远程框架/error框架/超载框架)隔离开来,方法是在它们之间插入框架。框架间距不能放在超载和错误框架之前。
帧(can fd)
TODO
仲裁
位填充
为确保数据框架不被用作错误框架(连续六个明确或隐藏的位置),并确保框架结尾标志得到正确识别(连续七个隐藏的位置),CAN网络同步在框架/远程框架、仲裁部分、控制部分、数据部分和CRC序列开始时需要有足够的上下调整(见第11段)。不包括CRC界定符如果同一水平为5位数,乘以1:
错误
错误的种类
CAN协议具体规定了发现误差的五种形式: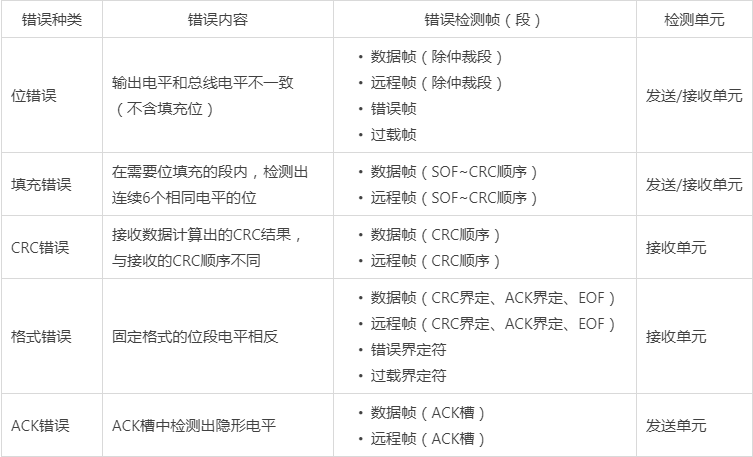
错误帧输出
位时序
CAN标准将每条总线分为同步段(SS)、传送段(PTS)、第一阶段(PBS1)、第二阶段(PBS2)缓冲段(PBS2),每条缓冲段称为时序,由多个时量(Tq)组成。
CAN协议的通讯技术是NRZ(不返回为零),在每位的开始和结束时没有同步信号连接。 发送单位开始以比特时间同步的方式提供数据,接收单位根据公共汽车水平的变化同步接收和接收数据。 然而,发送单位和接收单位的时钟频率错误以及传输线路(电缆、驱动器等)的延迟阶段可能导致同步偏离。 因此,接收单位要么通过硬件同步接收,要么通过时间序列的重新同步接收。
硬件同步
接收单位检测巴士的可用性。帧起始时在发现边界的区域内,SJW的价值不被认为是SS。
再同步
在接收阶段,接收单位对公共汽车进行检测。电平变化时当检测到边缘时, PBS1 或 PBS2 被 SJW 值校正,以调整同步。但是,如果错误大于 SJW 值,最大调整不能超过 SJW 值。
调整同步的规则
参考:
本文由 在线网速测试 整理编辑,转载请注明出处。

