可以搜索相应的设计标准ISO 11898-1和ISO 11898-2,以了解该技术点是如何构建的。它可以是一系列非同步通信,只有两条差分信号线 -- -- Can_HIGH和Can_LOW -- -- 数据通过不同信号传输,其好处是可以提高这些信号..
MCU/CPU;
CAN控制器,
CAN收发器;
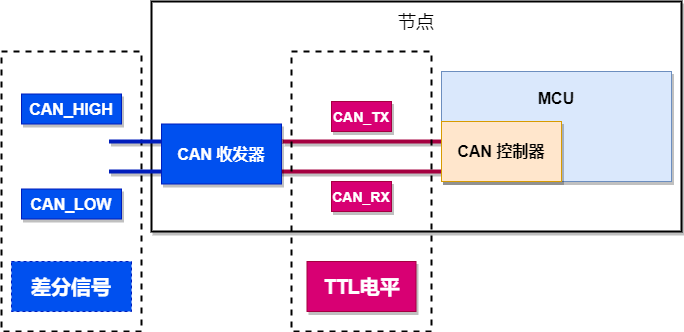
在CAN公共汽车上,数据通过差分信号发送。
CAN收发器是一种将差分信号转换为TTL级信号或TTL级信号转换为差分信号的设备。
CAN控制器接收TTL级信号并发送到MCU。
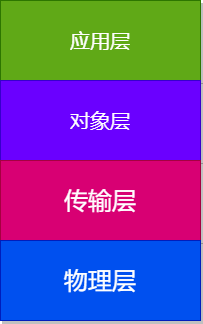
物理层是上述硬件牵引结构,包括高速和低速罐,而收发机是物理层。
主计长可以在传输层执行更复杂的任务,如CAN时间序列、同步、电文仲裁、确认、错误检查等等。 如果这只是应用程序开发,我认为只要获得一个简单的图像就足够了;在这一层必须完成的活动包括:
故障约束;
错误监测;
消息验证;
信息确认;
仲裁;
信息帧;
传输速率和时间;
路由信息;
对象层应是该层的一部分,需要 Can 信息过滤、处理等等。 ;
相容顶层建筑在物体层的额外信封上,例如工业自动化中使用的多个加拿大国际中心标准。
CANopenISO 14229为汽车诊断等界定了UDS;公交车在发送信件时必须保持闲置状态 。
电文购置总线的优先权越大,识别越小。
框架 : 框架包含要传输的节点数据 。
远程框架是请求传输某个标识符的框架。
错误框架: 被检测到不正确节点传输的框架 。
在数据框和远程框架之间插入延迟框架以超载数据框。
框架格式中的11个标识符
29个延长框架格式的29个标识符
sof:start of frame,表示数据框架的开始; (1位)Identifier标准格式11比特,扩展格式29比特,包括基础识别符(11比特)和扩展识别符(18比特),区域识别数据框架的价值较低,优先程度更高;RTR: 远程传输请求空格、 数据框 0: 00 、 远程框 1 、 或 RTR = 1, 信件框中的数据字段为空; (1 位)IDE: 识别分机扩展名,以正常格式为0小时,以扩展格式为1小时; (1比特)DLC数据长度代码 0 8 表示 0 8 字节; 4 位)Data Field(0-8字节)数据字段CRC Sequence检查域名和算法DEL: (1位) 检查要回答的字段和字段的隐含定义。ACK:答复,核查数据是否成功收到,所谓正常接收,即不包括填充错误、格式错误或CRC错误。收到数据后,将发送节点设为1,接收节点设为0; (1位)SRR:以扩展格式替换远程请求时段,必须为 1(1位)EOF7个连续的隐藏位置(1),框架末(1);7位)ITM:帧间空间,Intermission (ITM),又称Interframe Space(IFS), 三个连续的隐藏位置, 但它并不属于数据框。 Frame 空间是用来将数据框和远程框架与前面的框架分隔开来的框架。 数据框和远程框架可以通过在框架之间插入空间而与前面的任何框架( 数据框、 远程框架、 错误框架、 超载框架) 分开。边框的 RTR 值是“ 0 ”, 而边框的 RTR 值是“ 1 ” 。
远程帧没有数据块
错误标志:
个显性/隐性重叠位
活动错误标记( 6 个可见位置): 在活动错误状态的单位中发现错误时产生的错误标记 。
被动错误标记(6个隐藏位置):单位在被动错误状态下发现错误时产生的错误标记。
错误限制: 8 个隐藏位置
(a) 接收单位限制,迫使传输节点推迟下一个数据框架或遥远框架的传输;
间断 3比特探测可见位置
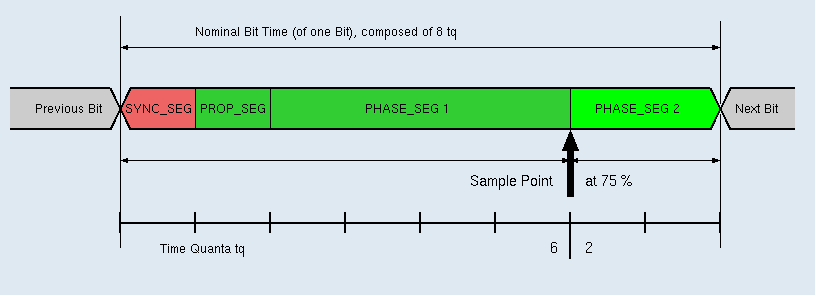
SYNC_SEG它用于同步各种总线节点,同步期为一次量长。PROP_SEG分布段, 18 倍量长度, 用来补偿网络信号延迟 。PHASE_SEG_1它用来纠正边缘阶段的问题,可以在整个重新合成期间延长。PHASE_SEG_2阶段缓冲2,2,8个时的量长度,用于弥补差幅的不准确性。设置过滤码为
00001567设置掩码为
1FFFFFFF设置过滤码为
00001560设置掩码为
1FFFFFF0设置过滤码为
00001560设置掩码为
1FFFFFF8设置过滤码为
0设置掩码为
0CAN_ID_STD设置为标准ID;CAN_RTR_DATA设置消息为数据帧;StdId为当前消息的ID;DLC为当前消息的长度;(a) OSI开放通信系统参考模式与OSI一致;
配有不同电子信号的双线公共汽车安排;
当公交车免费时,所有单位都可以开始发送信息,进入公交车的第一批单位将获得发送信息的许可;当几个单位同时开始提交信息时,发送高优先身份信息单位将有权发送信息。
电文不含源地址或目的地地址,只有标识符指定了电文函数和优先级。
具有预先定义的信息格式和短框架结构的广播公共汽车系统。
事件触发类型。 只有当信件必须发送时, 才会在总线上播放节点 ;
数据可以通过向其他节点发送远程框架发送 。
信件数据长度为 0 字节 。
错误检测功能。 在所有节点中, 都可能检测到错误, 而所有其他单位都会立即被提醒注意错误 。
当错误发送信件时, 节点会自动重新发布 。
误差限制。 节点控制器可以评估误差是暂时的还是持续的, 如果公交车上存在连续的数据错误, 控制器可以将节点从公交车上分离出来 。
通信媒介可以使用双弦、共轴电缆和光纤,大部分时间使用最廉价的双弦。
CAN公共汽车理论上可以使用单一信号线进行通信,但该公共汽车配备了与第一个信号有不同连接并能够有效控制电磁干扰的第二个指南。
通过40米长的电缆传输1Mbps的最大数据传输率;
(b) 虽然在公共汽车上可同时连接的点数理论数目不受限制,但实际可以连接的点数因公共汽车的延迟时间和电力载荷而受到限制。
最后更新:2021-12-09 21:11:50 手机定位技术交流文章
什么是CAN总线?
地区主计长网络,或Canbus或Canbus,是一种功能性连环公共汽车标准,第一个控制芯片在奔驰车中使用和创建,因为它支持并使用许多主机,因此所有控制器、传感器和电子设备直接连接只需要两条线,大大优化了整辆车的布局。
随着技术的进步,加拿大国际网络发布了适当的标准,国际标准化组织(标准化组织)出版了一些加拿大国际网络的标准。
| 标准 | 涵盖内容 |
|---|---|
| ISO 11898-1 | 数据链路层 |
| ISO 11898-2 | 高速CAN的物理层 |
| ISO 11898-3 | 那是一个错误的骗局的物理层 |
ISO 11898-1,ISO 11898-2这是相应的设计标准, 搜索将揭示这个技术点是如何建立的。
物理层
差分信号
那么,什么是物理层,什么是物理层?这是CAN电信传输技术。它可以是脚手架通信的缩略语。它只是..CAN_HIGH和CAN_LOW(b) 两条不同的信号线,通过不同的信号交换数据,这有助于提高信号抵抗干扰和压制不想要的信号干扰的能力;
具体如下图所示;
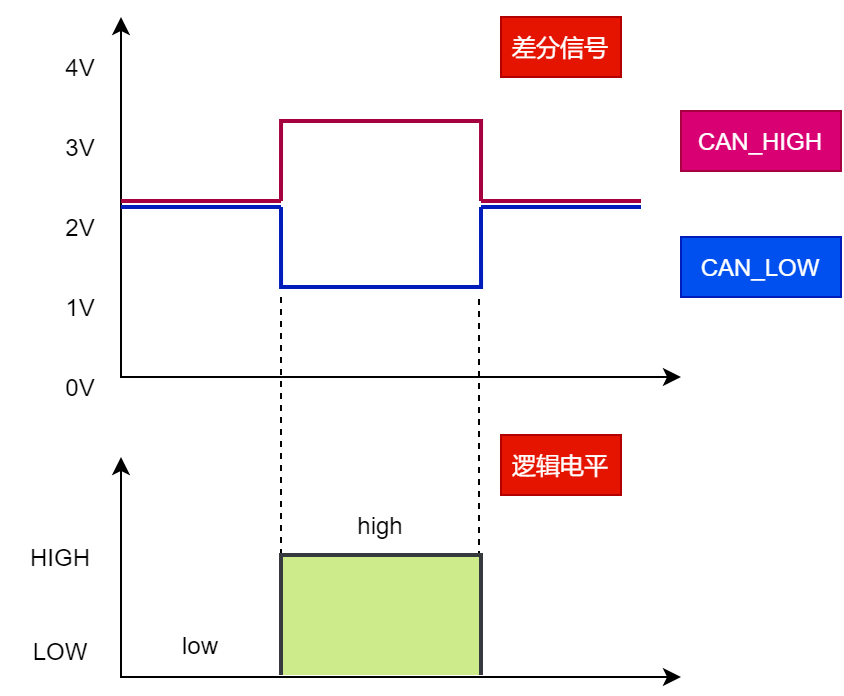
因此,在信号变成字节数字信号之前,以这种不同形式的模拟信号发出信号。
我们可以很容易地理解,当能HIGH减去CAN_LOW超过门槛值时,它是一个合乎逻辑的高点,当它低于门槛值时,它是一个合乎逻辑的低点。
让我们看看CAN公交车现在是如何连结起来的。
连接方式
公交车能让几个节点挂在上面。 它比较相似 。I2C总线,可以在SCL和SDA(a) 从飞机上挂载以下图象所描述的多重;
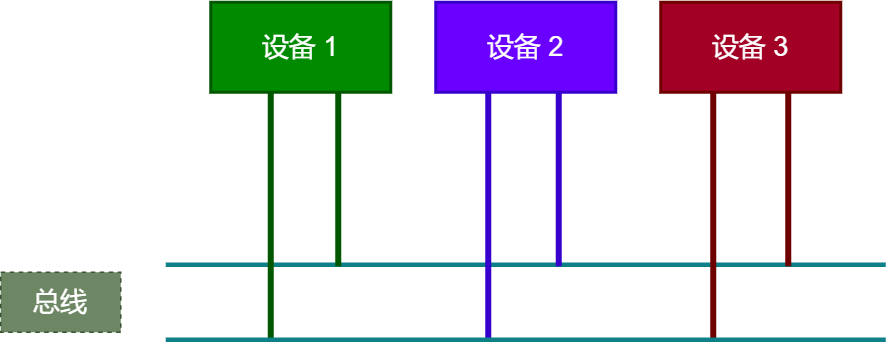
另一方面,CAN公共汽车没有中心概念,每个装置都是节点。Node与节点不同,节点可以直接相互作用。I2CCAN公共汽车具有终端阻力、共同的闭环连接模式以及相对开放的连接风格。
从高速罐与低速罐之间的区别可以看出,它们在不同连接模式上的通信速度也极为不同。
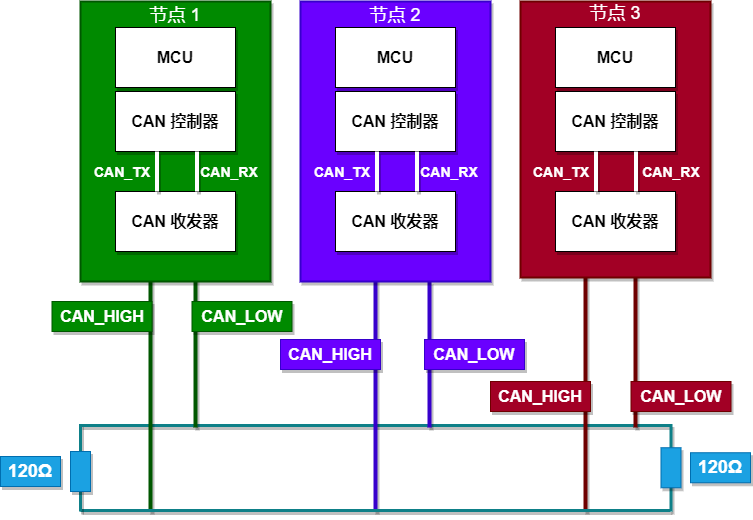
这两根铁丝线创造了一条双扼杀线,由于其特性而承受了120次。 ISO 11898-2,也称为高速罐。
使用了120Ω(a) 终端抗药性(按照CAN ISO标准的定义),最大通信速率在这一模式下为1兆bps,然后是传输远程至传输速度关系;
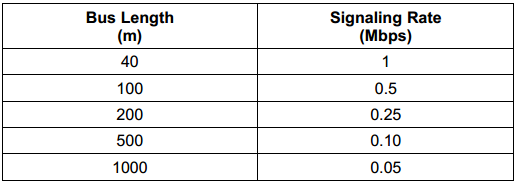
与信号速率成比例的CANCAN公共汽车长度
高速罐头的顶层结构如下:
还有一种低速度,有时被称为错误。1 Mbps降低到125 Kbps,而不是在公共汽车的开始和结束时使用两种最终抵抗力,抵抗力量在每一个节点上分布,如下图所示。
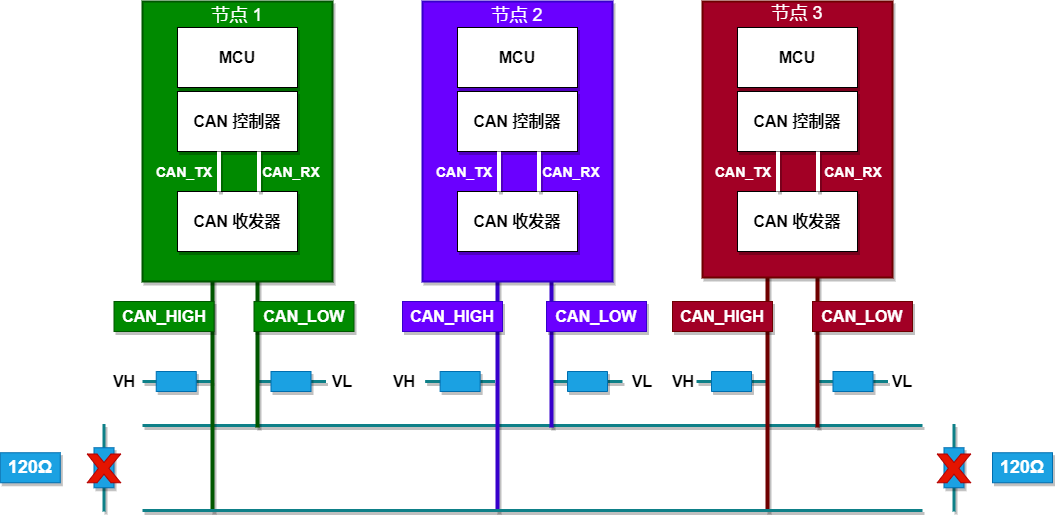
由于高速罐体和低速罐体的顶部结构不同,管道末端阻力的分布也不同,CAN_HIGH和CAN_LOW在水平上,这不一样;这里有一个秘密水平和可见水平。
硬件连接大部分是显而易见的,下面是如何产生一个特定的CAN节点。让我们很快通过这个节点。
CAN节点
CANP节点通常分为三节;
通常只有一台机器 外面有类似的罐头控制器 比如我们更熟悉的..STM32这就是我们拥有的大部分时间。
因此,整个程序如下:
因此,对单一机器开发商的担忧是,如何设置最终的CAN控制器向MCU提供的数据,以及如何配置CAN控制器并利用CAN控制器接收和发送数据。
在这种情况下,我们需要研究CAN公交车的通讯原则, 如何找到它, 以及高层协议如何规定它。
CAN协议
CAN议定书和网络议定书结构相同。
按照我的理解;
如何寻址?
因为Can的公交车新闻是广播的(这样大家就可以得到),
B和C节点根据B和C节中的电文识别和电文过滤标准进行比较。 如果该规则不能满足,则拒绝提供这一信息。
这里需要注意的是:
我们已经知道如何在这里发现一个站点, 我们会看看下面的结构。
帧类型
CAN有四种框架类型:
目前,必须集中关注数据框架,继续说明数据框架之间的差异。
数据帧
数据框架被归类为标准框架或扩展框架。
数据框架的编排如下:
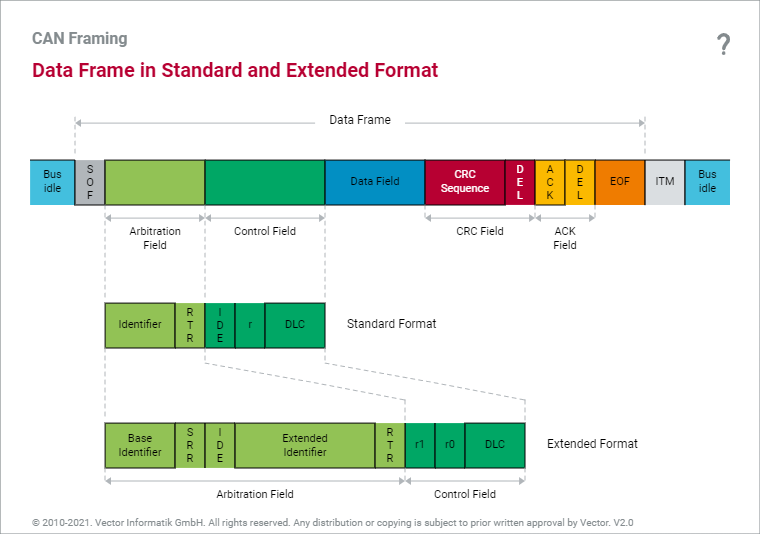
数据帧格式
(a) 简要概述数据框架的具体细节;
远程帧
通常情况下,数据由发送单位主动在公共汽车上传输,但有时接收单位会积极从发送单位获取数据,这是远程框架的功能,即接收单位请求向发送单位传输数据的框架框架,远程框架与数据框架的框架结构类似,如上文图十所示。
要求发送的单位的数据长度(Byte)由远程框架的 DLC 区块表示,当公共汽车上同一标识的数据框架与远程框架同时发送时,数据框架将获得仲裁中对总线的控制,因为框架的 RTR 点是显而易见的。
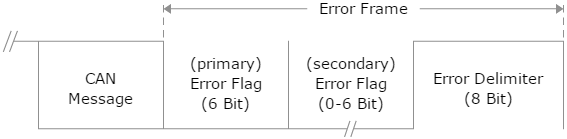
错误帧
当收到或发送信件时发现错误时,会通知错误框架。错误框架包括错误标记和错误分隔符。图11显示错误框架的框架结构。
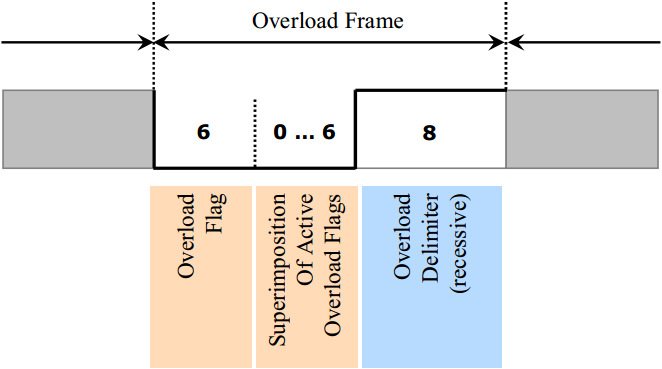
过载帧
超载框架用于接收尚未完成接收准备状态的单位通知单位。
每个节点一行发送两个中转框。超载框包括超载标记和超载分隔符(八个隐藏位数)。图12描述了数据框的框架结构。
can_overload_frame
这基本上是框架的结尾, 但我们怎么知道每个节点开始接收它, 并且它已经完成了? 我们需要知道信息的时间顺序, 以及它是如何同步的 。
消息时序以及同步
位时序
在讨论 " Can " 电文的时间序列和同步之前,我们可参考具有开始和结束位置的 " UART " 序列传输协议,然后我们都制定相同的通信费率(港口费率);
在现实中,CAN通信工作方式类似,是分步骤通信,没有时线,因此所有节点都同意使用相同的港口费率传输数据。
硬同步(起始位置)是在公交车自由一段时间后产生的,将每个时间突破至称为量子的数个时段,并在量子所在的四个阶段中指定一个具体数目。
这四个阶段分别为:
具体如下图所示;
位时序
波特率
为确定港口速率,必须知道每次量子时间(时间量子)的长度和每次需要的量子时间。
假设这里time quanta = 1us,并且1 bit = 8 tq因此,上图中的港口利率应当是:
消息过滤器
此前曾有人说,新闻是在CAN网络上播出的,但并非所有节点都对公共汽车上的所有信息都感兴趣。 一个节点通过过滤控制器的代码和掩码(Mask Code)以及验证公共汽车上的信息标识来选择是否接收信息(邮件过滤 ) 。
对于面罩,“ 1” 表示这对这个节点很重要, 而“ 0” 表示它与这个节点无关 。
例1:仅接收电文识别信息。00001567(十六进制)的帧
如果标识为全部 29 位元, 则所有标识符的位元都用于节点发现消息 。00001567接收,否则舍弃。
如例2: 信息接收器识别符00001567到0000156F的帧
节点识别带有 25 位ID 的信件, 且忽略了小于 4 位。 如果标识符的最大相同位置为 25 个, 则允许或拒绝 。
实例3:收件人的电文识别是00001560到00001567的帧
节点检测到有26位元和最少3位元的识别符号的电文。如果识别符号的最大位置为26个相同位置,则被接受或删除。
示例 4: 接收所有信件
公共汽车上的所有信息都由节点接收。
如何配置?
它解释了框架的种类和构建方式。MCU进行配置呢?这里以STM32F407HAL 库用于硬件平台初始化,在此设置。 一般来说, 我们需要配置 CAN 的端口速率、 信息过滤器等等, 下面的代码是简单的配置代码 ;
CAN所履行的职能列示如下,我们必须创建正确的信息框架格式,通常使用信息框架的ID格式和电文长度,如下文所示;
无法关闭临时文件夹:%s。
上文讨论的框架结构有一段简短的导言,但篇幅有限。
总结
以下简要概述全球气候行动网络,《全球气候行动网络》通讯的内容可说明如下:
这是小麦叔叔送的礼物 小麦叔叔是作者
本文由 在线网速测试 整理编辑,转载请注明出处。

