自动驾驶之——CAN总线简介_wtlll的博客-CSDN博客
最后更新:2021-12-27 20:53:29 手机定位技术交流文章
自动驾驶技术中无人驾驶的 CAN 公共汽车
CAN 是Controller AreaNetwork中国是一个控制器局域网, 一个标准化的系列通讯协议, 一个用于实时应用的系列通讯协议总线,
现代汽车配备了几种控制系统。这些控制系统建立在网络技术进步的基础上,并在一些微服务处理方案下运作。气袋、刹车、巡航控制、电力传输、音响系统、电窗、门、后视镜调整按钮、电池和补给系统只是几个例子。这些系统必须相互交流和相互阅读。因此,创建并执行了《加拿大国际气候行动网络协定》。它的功能类似于汽车的神经系统
这是一个基本网络,汽车可以通过这个网络传送感应数据。这是一个奇妙的集合 错综复杂的部件。这导致示范和实施了一些新的功能,我们希望在汽车的使用方面看到这些功能。这里可以看到1988年BMW 8系列。这是世界第一辆使用Can公交车的汽车。
使用 Can- Bus 作为自动驾驶
鉴于自动驾驶技术的迅速发展,Can-Bus应用程序的想法也越来越受欢迎。为什么呢?因为许多自动驾驶机不会从上到下产生大规模无人驾驶飞机。相反,它侧重于车辆控制方案规划。这是首次创建汽车,它通过汽车的CAN-Bus协议被用于反向工程研究。无人驾驶汽车开发商可以使用软件控制汽车。这就像转动,加速,制动等等。
无人驾驶车辆通过激光雷达(LIDAR)等传感器配备了惊人的“感知”世界能力,使小型PC能够决定导航、加速、制动等活动。
CAN CAN 公共汽车技术开发历史
CAN公共汽车是德国Bosch1986年发明的,用于监测和管理汽车。它主要用于内部车辆测量和执行部分通信。这是BMW在1989年使用Can-Bus号汽车开出第一辆汽车后使用的第一辆汽车。巴士开始其奇妙的旅程。人们赞赏其业绩强健和可信赖性。除其他用途外,工业自动化、船舶、医疗设备和工业设备也经常使用。如今,CAN公共汽车是自动化技术增长最活跃的领域之一。在自动化领域,它被称为计算机局域网。该系统的采用为分布式控制系统提供了大量技术援助,以便在节点之间建立实时可靠的数据连接。
C. 实时和通信可靠性
加澳新公共汽车具有良好的实时性和可靠性,自开始成为地面试点以来,已经迅速扩大,成为地面试点。然而,它确实有一些缺陷。搭载波浪的监听和非破坏性仲裁办法能否用于公共汽车通信?在网络负载较小时,你难道看不出主线足够实时 适合各种各样的要求吗?但是,随着网络流量的增加,因此,公共汽车上信息崩溃的可能性增加。如果你坚持标准CAN协议低优先通信失去其实时方面。当网络载荷达到特定临界值时,公共汽车竞争便终止。CAN公共汽车协议采用静态固定优先分配办法。因此,在公共汽车使用方面,很难以平等的方式提供关于不同优先级别的信息。这些缺陷已证明是它们持续增长的障碍。
CAN 公共汽车的基本运营原则
CAN协议包括全面的序列数据传输、实时支持、最多1兆b/s的传输率、11个同时的位置和误差探测能力等等。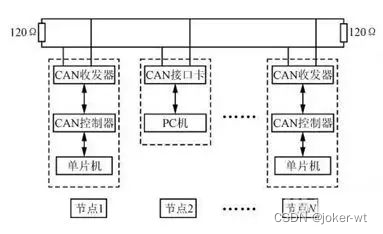
CAN公共汽车用户界面是基本的,程序程序很简单。 网络顶端结构以公交车线路结构为基础。 这一网络结构简单、成本低廉,并且通过使用无源头对头连接提供高系统可靠性。 连接CAN公共汽车上的各种网络节点以建立一个多主机控制局域网( CAN ) 。
信息传输使用通信协议。这是用Can控制器完成的。对于有微型控制器的智能节点而言,网络节点往往通过CAN协议进行现场数据收集和数据传输。节点可以与CAN控制器上的微控制器一起使用。要执行节点操作,请选择一个带有独立 Can 控制器的通用微控制器。双重扼杀、共轴电缆或光纤都可以用作传输介质。
如果系统承受干扰的能力必须进一步提高,它还使控制器与传输介质的光电分离成为可能。电力利用DC-DC变压器等设备。这样就更容易建立实时分布式监测和控制系统。微控制器,要执行节点操作,请选择一个带有独立 Can 控制器的通用微控制器。双重扼杀、共轴电缆或光纤都可以用作传输介质。如果系统承受干扰的能力必须进一步提高,它还使控制器与传输介质的光电分离成为可能。电力利用DC-DC变压器等设备。这样就更容易建立实时分布式监测和控制系统。
自动驾驶系统解构 CAN 公共汽车数据的方式
当无人系统获取Can信息时,本段讨论的关键议题是,如何按照CAN协议解构无人系统所需的数据。
每个自动驾驶工程师,甚至每个汽车电子工程师,都必须能够从CAN系统中分离传感器信息。
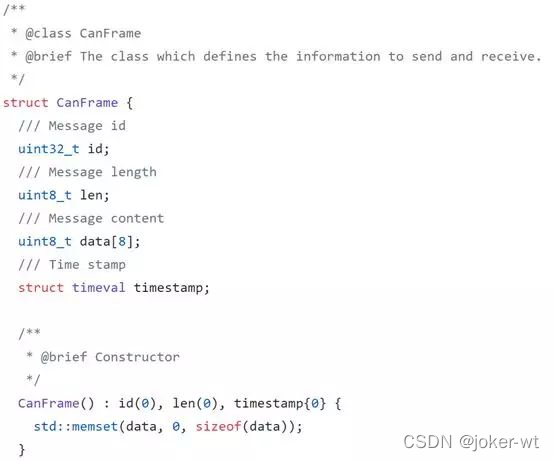
CanFrame是一个信息结构,由四个重要信息组成:
i. int32_t id( 电文代号)
由于在Can主线上广泛传播Can新闻,因此,当两个节点相互作用时,会先看id号,确保 " Can " 信息成为正在寻找的节点。Can Newsid的最初范围是00-7FF(16位数)。然而,当汽车动力增加时,有许多信息需要传达。信息不太够用了。根据《Can News》,工程师写道:身份号码已经延长。ID的上限已大幅扩大,id的上限也已提高。增强的Can信息被称为“扩展框架”。“ 常规框架” 是 Can 信件的前名 。
当比较信件时, ID相对接近信件封面上写的名字 。
2. int8_t len (有效长度的电文)
每个框架可传输多达8个未签名的矫形数据,或8*8 布尔型数据。 这里的圆形的最大值为 8, 如果框架中的一些 CAN 信息没有数据, 则 Len 不到 8 。
以3. int8_t [8] 形式提供的数据(来自 Can 信息的真实数据)
如前所述, " Can " 信息的每一框架由8个字符组成。我们有8个布尔型的数据点, 所以我们可以通过8个Can News的数据用8个方形可视化,如下图所示:
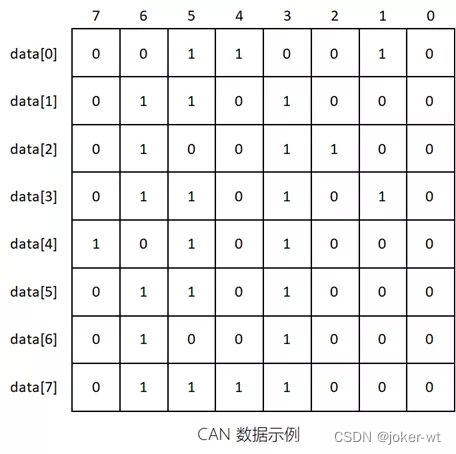
没有CAN同意帮助我们破译数据,这里的数据与数据没有区别,也没有有价值的信息,这是CAN信息难以破译的原因之一。
四,时间印章。
时间戳显示收到 Can 信息的时刻。 可以使用一系列时间戳来计算 Can 信息的循环周期, 或者确定 Can 信息是否持续收到 。
简言之,每对CAN信息中最重要的部分是数据,或八种。解决"Can"信息的方法就是解决第八点有八种布尔型值。
认识CAN协议
目前,该行业的CAN协议保存在文档中,这些文档后来被标为Dbc.Vector,德国,制作了Candb+Editor,这是一个专门用于阅读Dbc文件的方案。
下面的图像描述了为我提供的汽车的DBC文件。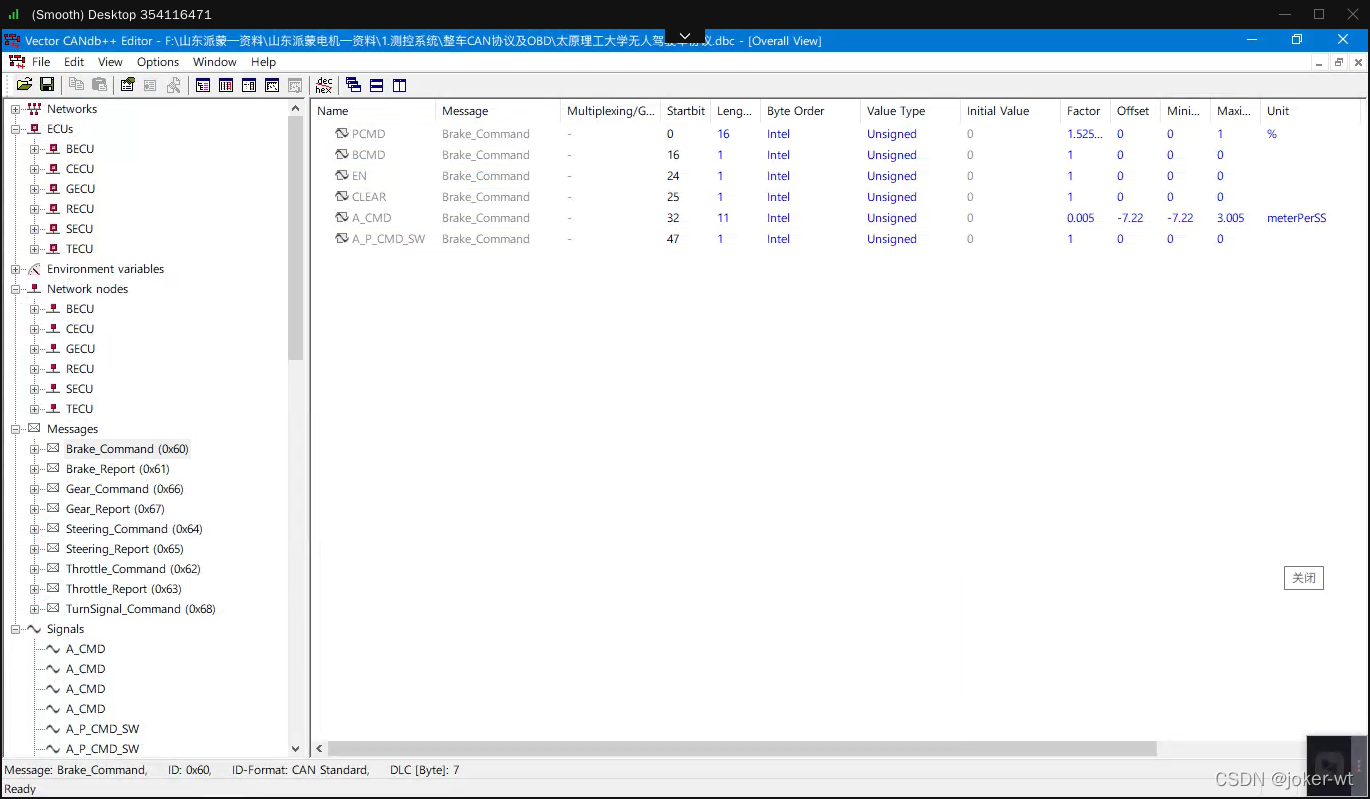
在程序右侧显示每个信号的准确描述,并在绿箱中选择了与分辨率密切相关的三个元素。
一.Value(未签字或签署)
一些物理数字,例如温度,用符号表示,而另一些则用符号表示,没有符号,即正数,如弯曲形状。
二、因数和冲抵
在计算体积时必须考虑到这两个因素。它不一样,因为它是不一样的,因为它是不一样的 因为它是不一样的,因为它是不一样的 因为它是不一样的,因为它是不一样的 因为它是不一样的,因为它是不一样的(单位:千美元)例如, Lane_Type 和质量信号的系数为 1。Offset为0,其他信号都是小数格式的。请查阅下表以更完整地计算。
当双击 LKA_Left_Lane_A 并打开布局标签时,你会看到一些熟悉的方形阵列,如下图所示。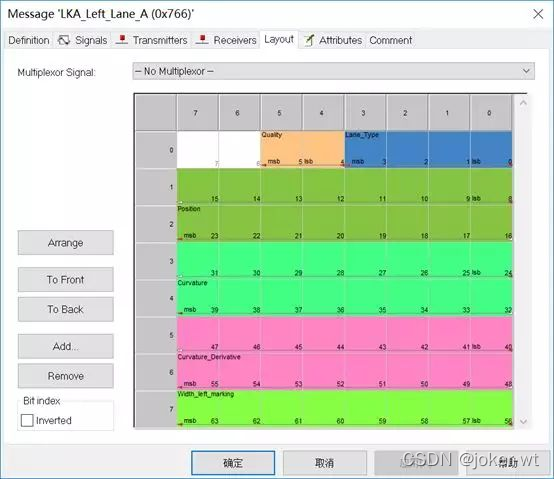
工程师主要关心的是这张彩色地图, 因为地图上每个小方块都与数据中的每个电压相对应。 这就是 CAN 的本质。
CAN帧
一辆汽车有几条CAN干线。为了完成A/C系统的开放和关闭,要开公交车,我们需要找到合适的CAN。根据福特融合组织的说法至少确定了四条公共汽车路线。其中三个,HS1、HS2和HS3,使用500千位/秒高速CAN公交车。1 是 125 kbps 中速 Can Bus MS 。
OBD-II接口有两种CAN型公共汽车:HS1和HS2。然而,在恶意命令的情况下,他们都关闭了但是在Voyage的Alan的帮助下我们完全解决了OBD-II限制问题。我们已经知道怎么去HS1,HS2,HS3和MS秘密隐藏在 OBD -II 界面下一个所有总线汇总,它被称为“网关模块模块组件”组件。以下是Voyage第一辆无人驾驶出租车的后座控制界面概览:
由于A/C系统可通过车辆媒体接口(SYNC)进行修改,所以,我们正赶往MS中速公交车那么,我们如何使计算机能够读写流网?Socketcan是解决问题的办法。它是开放源码,由Linux Inner核基金会的著名研发公司以及一系列网络银行协议支持。
我们可以将GND、MSCANH和MSCANL3的电线从车上连接到Kvaser Leaf Light HSv2和Cable。然后在另一端,为了安装计算机连接,使用了新版本的 Linux 内核。加载 CAN 公交车以识别网络设备:
GND: 地线和公共连通
MSCAN代表中速公共汽车。2011年叙利亚抗议活动特别报导,根据0号协议,CAN总线控制器是汽车控制器目前盛行的CAN控制结构。海安会和海安会分别负责高级别和低级接线。
Kvaser Leaf light HSv2 是 CAN 的单一频道 USB 界面, 使您能够快速将多个界面连接到典型的 PC 计算机 。
我们可以在装货后尝试利用它。candump can0分析流程, 命令 :
但是,这就像目睹一个声音信号被放大。很难辨别出运动和行为模式。在此,为了进行频率等值分析,我们必须使用工具罐头。Cansniffer 显示一组数据集 ID 。它可以帮助我们在CAN框架数据区变化时正确定位。有了这个功能,可确定哪些数据包应予删除。以及什么与我们的问题相关。
CANSniffer为研究系列数据包,一个用于传输和接收CAN-格式数据包的分析软件,通过序列港与外部设备接口。
在MS中速巴士上,这里有一个例子是 罐头抢抢。所有通过序列流出的数据包都在过滤中。只需要355、356和358的数据包的 CAN id 是必需的同时,为了检查数据包的变化,按下汽车空调按钮。该按钮的开关效果被发现为001C00。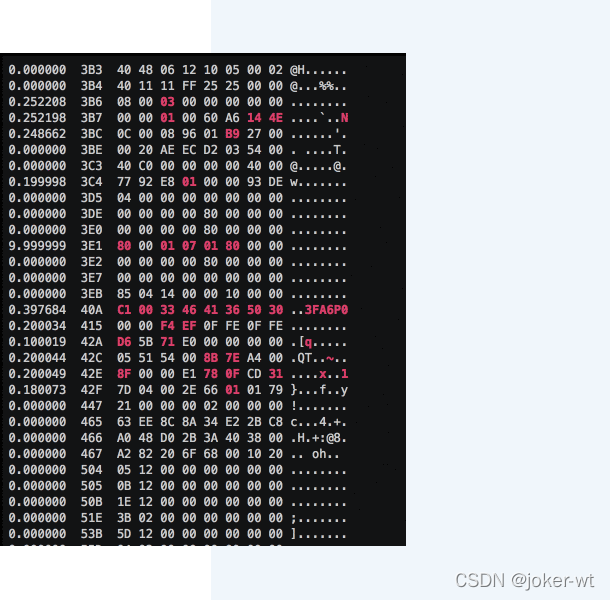
控制汽车空调系统(A/C系统)
下一阶段是将A/C系统与我们在车辆中使用的微型计算机连接起来。个人计算机(PC)是一种机器人操作系统(ROS)。而幸运的是,该项目以先前提到的Socketcan和ROS单元为基础。连接和使用很简单。此外,我们可以使用套接字桥将我们的CAN数据框架转换成接收到的消息。完美!
以下是如何解码A/C功能数据集的例子:
Celsias Report 是 msg 文件中生成的数据的名称 。
在点击与A/C系统有关的功能按钮后,我们将看到以下匹配的代码列表:
我们现在可以直接向ROS节点传输与上述字符串相匹配的数据代码,该节点将数据信息转换成汽车可以识别的特定代码:
解析CAN信号
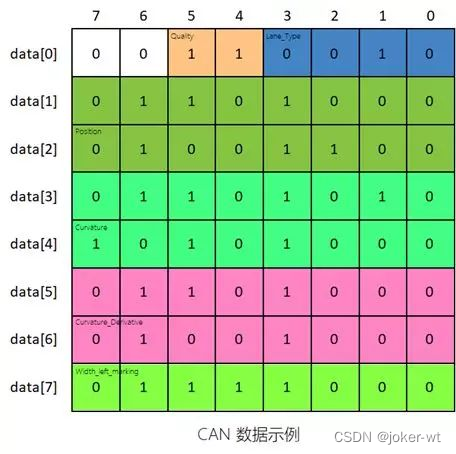
由于颜色方图与数据相关,我们增加了两张地图,并将按下图所示提供数据。
一. 因素的物理质量为一。
由于 Lane_Type 和质量系数为 1, 偏移值为 0, 小数数等于实际物理数量 。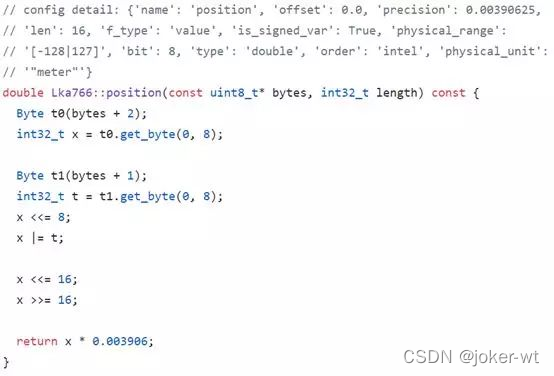
图表清楚地表明,质量信号在两个地点,即第11号二进制,转换为小数点值3(1)。2 + 11); Lane_Type有4个职位,二进制=0010,小数转换=2=0。8 + 04 + 12 + 01)。
因此,这一框架信号表明,目前该类型左边的车道线是2条。质量评级为3。对于整数值,通信规则可由所涉两人商定。例如,Mobiveye规定:质量报告显示,在下午0时或1时,公路线缺乏信心。目前不建议使用这一价值;2 表示中度信任。3表示置信度较高,请放心使用。
二. 因素为小数物理。
分离技术对于物质数量不是一(如位置),而是公式不变(如方位)的物理数量是必要的。以100度阿波罗源代码为例。
Can News 的数据在此以字节显示 。然后,去掉包含Postion信号的线条在变量 t1 中,从行1中存储八个布尔值。在变量 T0 中,第二行中存储了8个布尔值。由于Can宣布,同时,该职位有8个上层和8个下层。因此,必须计算第一行和第二行中的所有布尔比特。8比特高位变量x以32比特变量储存。在32位变量中,储存的位值低8位变量。
八点八分八分 八点八分八分八分现在必须合并将高8位左移8位,然后我们向下移到八位, 然后我们做它,我们不得不做它。可获取位置的二进制值 。随后向左推进16个职位。设计一个额外的右16位移动,以将32位变量x的所有16位数高度在初始时修改为零。然后通过乘x乘以因子 + 峰值来得出真实的 Postion 值 。我们不是要有一个真实的, 但我们要有一个真实的, 我们会有一个真实的, 我们会有一个真实的, 我们会有一个真实的, 我们会有一个真实的, 我们会有一个真实的, 我们会有一个真实的,你可以得到真正的货币价值。
与CAN达成了类似的通信安排。
一些传感器更喜欢在CAN公共汽车载荷上升时采用不同形式的通信。 例如,激光雷达点在云量数据上过于庞大,无法通过局域网传送;全球定位系统,例如,和习惯性,无法通过序列端口进行通信。
虽然通信技术和议定书差别很大,但解释机制仍然一致。
最后,由于CAN电文的格式不同于ID格式,工程师在写代码时必须极为谨慎,否则在以后的程序中将引入意外缺陷。
本文由 在线网速测试 整理编辑,转载请注明出处。

