搭建机器人电控系统——通信协议——CAN通信及其实例
- 筛选器/过滤器有两种模式:
标识符列表模式:把要接收报文的ID列成一个表,要求报文ID与列表中的某一个标识符完全相同才可以接收,可以理解为白名单管理。
掩码模式(屏蔽位模式):把可接收报文ID的某几位作为列表,这几位被称为掩码,可以把它理解成关键字搜索,只要掩码(关键字)相同,就符合要求,报文就会被保存到接收邮箱FIFO。 - 标准格式和扩展格式区别:
仲裁段(ID)长度:标准格式是11位,扩展格式是29位(即可以设置29位的CAN ID)
控制段起始:标准格式为IDE位+r0位;扩展格式为r1位+r0位。 - 为防止突发错误而设定,CAN协议中规定,当相同极性的电平持续五位时,则添加一个极性相反的位,这个位对数据传输没有影响。
- 同步段(SS):1Tq,在帧起始信号SOF出现时,将这个信号的跳变沿包含到同步段SS内,实现硬同步。
- 传播时间段(PTS):1—8Tq,用来补偿实际的物理延时。
- 相位缓冲段1(PBS1):1—8Tq,用来补偿硬同步阶段的误差,延长时间长度,称为重新同步。
- 相位缓冲段2(PBS2):2—8Tq,用来补偿硬同步阶段的误差,缩短时间长度,称为重新同步。
*需要设置的参数:重新同步补偿宽度(SJW)1—4Tq,可以以此来规定PBS1和PBS2的长度,会对通信速率有影响。
*采样点:某一位的电平由该位中的采样点电平决定,采样点在PBS1处结束。 工作模式:
初始化模式(INRQ=1,SLEEP=0)
正常模式(INRQ=0,SLEEP=0)
睡眠模式(SLEEP=1)测试模式:
静默模式( LBKM=0, SILM=1 )
环回模式( LBKM=1,SILM=0 )
环回静默模式(LBKM=1,SILM=1)调试模式
- 每个接收邮箱(FIFO)包含标识符寄存器、 数据长度控制寄存器、2个数据寄存器,负责设置接收数据传输协议中的各种帧大小。
- 有28个过滤器/筛选器,对应的寄存器用来设置CAN通信的模式,对应模式的长度以及过滤器的激活状态。
- CAN_IT_TME: 发送邮箱空中断
- CAN_IT_FMP0: FIFO0消息挂起中断(有信息之后产生中断)
- CAN_IT_FF0: FIFO0满中断
- CAN_IT_FOV0: FIFO0溢出中断
- CAN_IT_FMP1: FIFO1消息挂起中断
- CAN_IT_FF1: FIFO1满中断
- CAN_IT_FOV1: FIFO1溢出中断
- CAN_IT_WKU: 唤醒中断
- CAN_IT_SLK: 睡眠确认中断
- CAN_IT_EWG: 错误警告中断
- CAN_IT_EPV: 错误被动中断
- CAN_IT_BOF: 总线关闭中断
- CAN_IT_LEC: 最后一个错误代码中断
- CAN_IT_ERR: 错误中断
最后更新:2022-02-06 16:18:49 手机定位技术交流文章
通信协议
串口通信详解
IIC通信详解
SPI通信详解
CAN通信详解
计算机与外界的信息交互称为通信。
基本的通信方式分为两种:
串行通信:所传送的数据各位按顺序一位一位地发送或接受,占用资源少,速度相对较慢。
并行通信:所传送的数据的各个位是同时发送或接受。速度快,占用引脚资源多。
通信的速率:
比特率(bit rate):每秒能传输的二进制位数。
波特率(Baud rate):每秒能传输的码元数(不一定是二进制)。
对于数字信号而言,波特率=比特率。
串行通信的种类:
同步通信:带时钟同步信号传输,通讯双方是受同一个时钟源控制,如I2C、SPI、USART。
异步通信:不带时钟信号同步,不是同一个时钟源,按照一定规则传输,如USART、UART、单总线、CAN。
串行通信的方式:
单工:只允许单方向传输,只需一条信号线
半双工:允许非同时进行的双方向传输,只需一条信号线。
全双工:允许同时进行双方向传输,需要两条信号线。
通信协议是主控MCU与各类驱动器、传感器之间实现信息交互的基本逻辑,搞懂通信协议在机器人的电控系统中占有很重要的地位。在接下来的内容中,我将分别讲解串口、IIC、SPI和CAN通信协议的区别原理以及结合实际一些模块的代码部分。
CAN通信
什么是CAN通信?
CAN通信是串行通信的一种,但要优于传统串口协议总线,如汽车上的电气部分就采用CAN总线。与SPI和I2C不同,CAN总线不是以时钟信号来进行同步的,而是通过自己独有的位时序来同步的。它是一种异步半双工通信,通过两条线传输(CANL和CANH)。
CAN通信的优点:
由于真实环境中干扰因素很多,不稳定,CAN通信采用了差分信号传输。即使环境问题导致CAN_High电压发送变化,则CAN_L也会发送同等变化,两者做差即可抵消由于这个环境引起的变化。
对比SPI:CAN节省了布线资源。
对比I2C:CAN提高了传输速率。
CAN通信电平格式:
CAN_Rx和CAN_Tx分别是从MCU中接出来的引脚。
比如MCU要发送一个逻辑1,则只要将CAN_Tx设置为1,经过CAN收发器转换(将MCU的TTL电平转化为CAN通信差分电平)。
CAN_High和CAN_Low 线上的电压均为 2.5v,即传到总线的电压差 Vh-Vl=0V,总线上的状态则就是逻辑1。
同样,当CAN_High和CAN_Low 读取到 CAN总线电压分别3.5V和1.5V,即压差为2V,经过收发器转换,MCU则可通过CAN_Rx读取到信号0。
**隐性电平——电压差为0——逻辑电平为1
**显性电平——电压差为2——逻辑电平为0
CAN通信的结构:
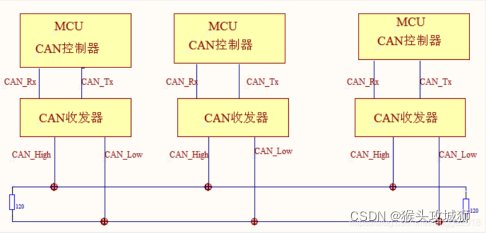
在CAN总线的起止端有一个120Ω的终端电阻,是用来做阻抗匹配,以减少回波反射,保证传输的稳定性。匹配电阻不能过多,只用在传输线的起始位置和终止位置添加即可,过多会导致传输丢失,在实际中要看主控板和接收端是否都有匹配电阻。
CAN通信协议
CAN通信没有地址的概念,所以同样少的线要求CAN通信有一个更复杂的协议。
空闲状态:总线上连续出现11位隐形电平(逻辑电平为1,线上电压为0)时,节点就认为总线处于空闲状态。
*总线上显性电平具有优先权,只要一个节点显性,总线就为显性。隐形则意味着所有节点都要输出隐形电平。
*同一时间只允许一个节点传输数据。
传输状态:当总线为空闲状态时,节点就会立即上报自己的数据,这个数据里不仅有数据,还有本身的ID信息或者其他的控制指令,传输的整个数据包称为报文/邮件/帧。CAN中一共有5种类型的报文/邮件/帧。
------------------------------------------------------------------------------------------------------------------
数据帧:用于发送单元接收单元传送数据。(通常)
远程帧:用于接收单元向具有相同ID的发送单元请求数据。
错误帧:用于检测出错误时的上报。
过载帧:用于接收单元尚未做好准备时的上报。
帧间隔:用于以上几个帧之间的分隔。
------------------------------------------------------------------------------------------------------------------
数据帧的传输:
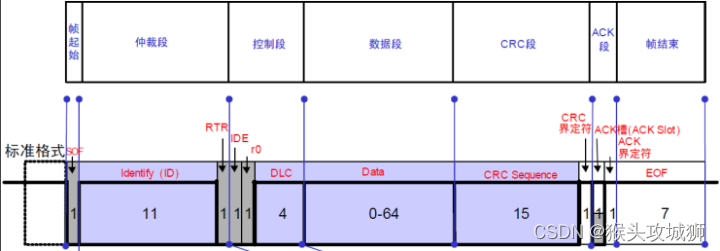
①起始位(SOF):显性位(置0,传输电压2V,代表传输开始)
②仲裁段(ID):11位,即本帧数据的ID信息,这段信息会被筛选器/过滤器筛选,来判断多个节点传输时谁优先?(0位多优先级高)传输目标节点通过识别ID数据位来判断是否接收?
③是否为远程帧(RTR):1位,保持显性(置0)。数据帧为0,远程帧为1,远程帧没有数据段。
④标准格式和扩展格式(IDE):1位,标准格式为显性(置0),扩展格式为隐形(置1)。
⑤数据长度帧DLC:4位,表示接下来数据段含有的字节数,因为数据段最多为64位(8字节),所以DLC表示的数字范围为0-8(0000到1000),先高位再低位。
⑥数据内容帧DATA:64位,共8字节,对于每个字节来说,先高位再低位。
⑦校验帧CRC:15位(检验位)+1位(间隔位)检查是否有错误。
⑧应答帧ACK:1位(应答位)+1位(间隔位)
⑨停止位:7个连续的隐性位(置1,传输电压0V,代表传输结束)
传输的实例:
0 01000000000 0 0 1000 XX…XX CRC 11 1111111
传输的“时钟”——位时序:
CAN通信本身没有时钟线,所以它通过位时序来同步,充当时钟的作用,以此来保证接收的正确。
位时序:CAN通信传输一个数据帧本质是一连串的电平信号,每个电平信号代表一位。我们把每一位又分成四段,分解后最小时间段单位为Tq,一个完整的位由8到25个Tq组成,称为位时序: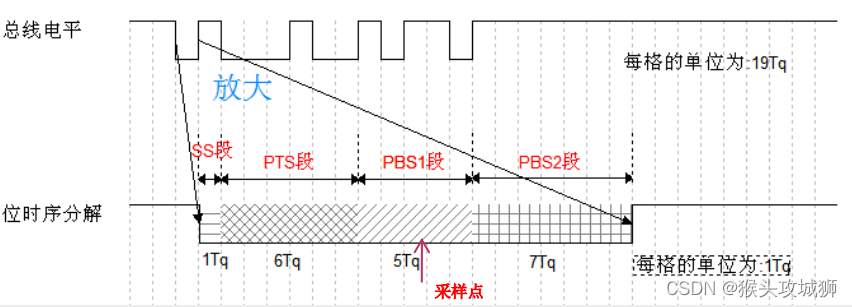
CAN通信波特率
*CAN通信速率大小(波特率)=CAN外设时钟频率/((SJW+PBS1+PBS2)CAN分频系数)
CAN通信的特点
CAN总线是可同时连接多个单元的总线。可连接的单元总数理论上是没有限制的。但实际上可连接的单元数受总线上的时间延迟及电气负载的限制。
降低通信速度,可连接的单元数增加;提高通信速度,则可连接的单元数减少。
CAN通信传输过程
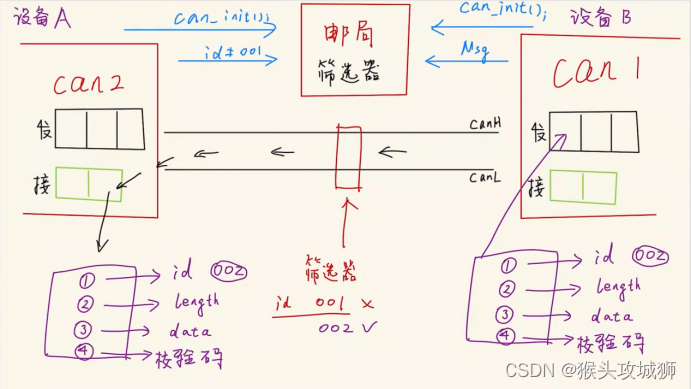 此图来源于某站UP421施公队
此图来源于某站UP421施公队
STM32中的CAN通信
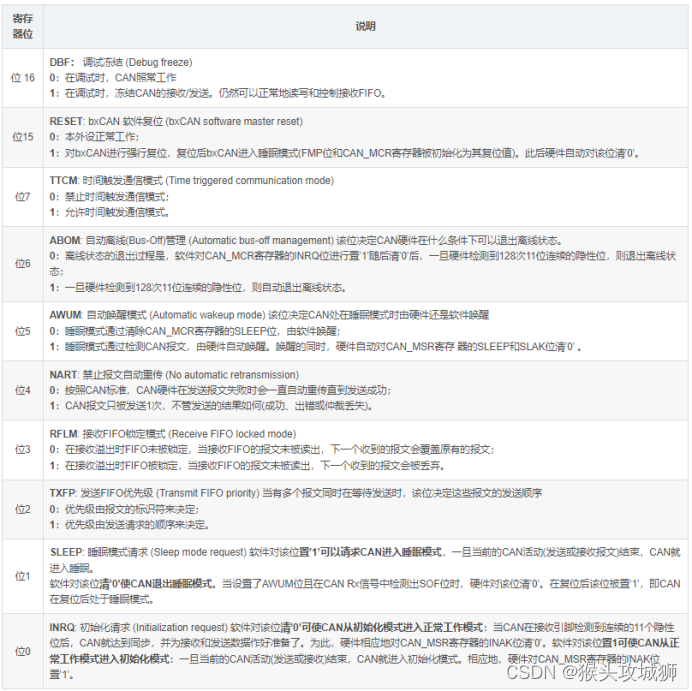
①CAN主控制寄存器(CAN_MCR)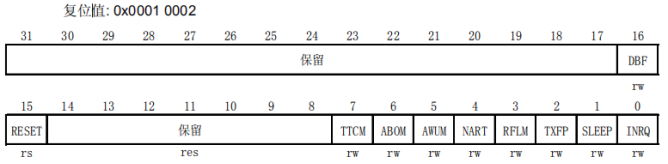
②CAN通信工作模式
正常模式:节点正常向节点发送和接收数据。
静默模式:(发送受限,正常接收)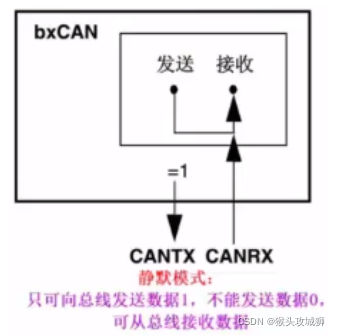
回环模式:(可以发送不能接收,总线可以监测数据)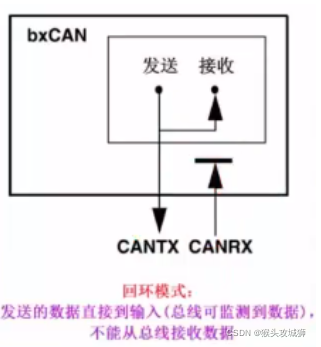
回环静默模式:(可以发送不能接收,总线不可以监测数据)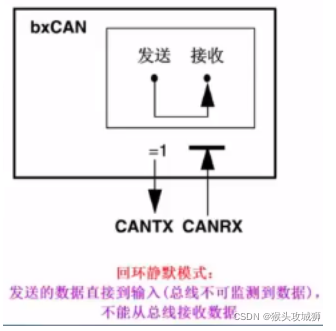
③位时序寄存器(CAN_BTR)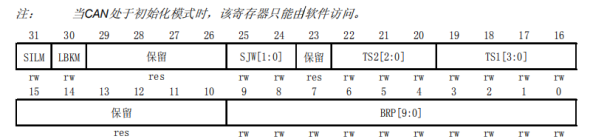

④3个发送邮箱
每个发送邮箱包括标识符寄存器、数据长度控制寄存器、2个数据寄存器。负责设置传输协议中的各种帧参数大小。
⑤2个接收邮箱(FIFO)
关于CAN通信更详细的知识看博客:
CAN通信寄存器详解
STM32 CAN通信编程参数设置
①主寄存器设置(CAN通信基本配置)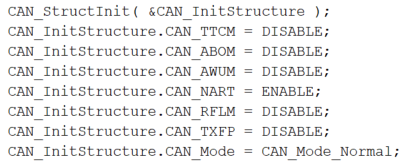
②位时序设置(波特率)
③过滤器设置(发送邮箱过滤器)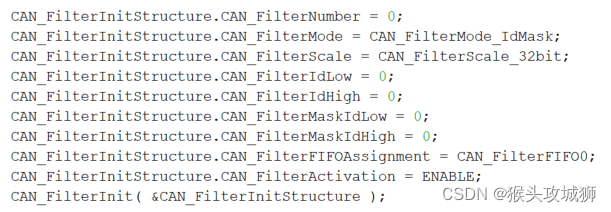
④发送邮箱设置(发送方参数)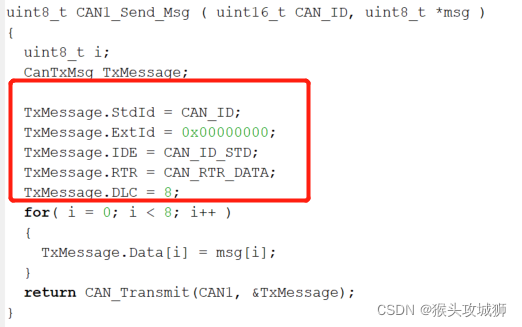
⑤接收邮箱设置(接收方参数+中断标志参数)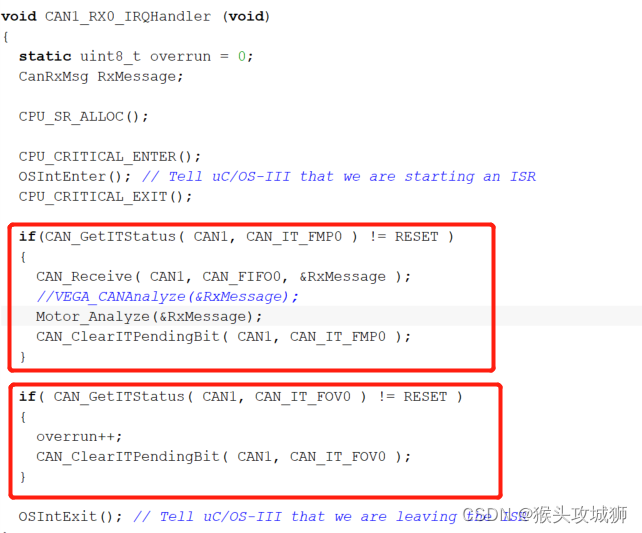
CAN_GetITStatus函数用于检查CAN通信接收中断是否发生
其中检验的参数可以是如下几个:
CAN_GetITStatus位将默认为0(RESET),当中断发生时,将变为1(SET)。
本文由 在线网速测试 整理编辑,转载请注明出处。

