嵌入式开发中的通讯协议(UART、SPI、CAN、I2C)
- TXUART: 发送
- RX UART: 收到
- 作为对称的系列通信协议,UART的操作前提是对传输数据的每个字符逐个传送数据。
SCLK: 主机用于同步数据流和输出的序列时钟 。
MISO(奴隶主产):主机输出主机输入
MOSI:机器输出奴隶进入(主输出奴隶进入)
CS: 由主机出口的低水平有效的片段线
主机通过读取的MOSI线提供一小段数据;
机器在主机读到的 MISO 线上向主机发送了一点点数据。
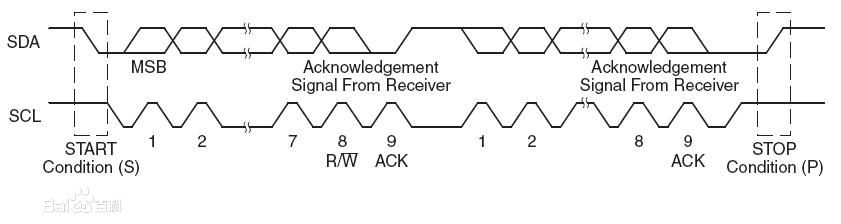
- SDA:数据线
- SCL:时钟线
- I2C连接总是通过抵抗输入电压而拉起,它们以三种速度运行:高速、快速和慢速。
- 如果主机要从设备中传输数据,主机首先从设备中获取地址,然后单独从设备中发送数据,直到主机终止数据传输。
- 如果主机接收设备的数据, 首先是设备的主要搜索站点.. 那么主机接收设备传输的数据, 最后主机关闭接收程序。 在此情况下, 主机负责建立一个时钟并停止数据传输 。
- 每个字节必须长8字节,最后必须回答的人必须回答。
- 每种传输可转让的字节数量没有限制。
- 最初是从机器地址发来的
ACK会响应地址匹配 信号设备已经存在
启动信号:主机保持时钟SCL高,而数据自失能系统则从高向低过渡。
停止行号:SPL在东道国特许权中仍然处于高水平,而数据自失能系统则从低水平上升到高水平。
反应信号(ACK):在第9钟周期,在收到八位位数据后,接收器将自失能系统拉低到一个低水平。
在SDA上提供的数据必须在短链氯化石蜡含量高的整个期间保持稳定,在短链氯化石蜡含量高时,外部设备将读取这些数据。
只有在短链氯化石蜡处于最低水平时,有关SDA的数据才能改变。
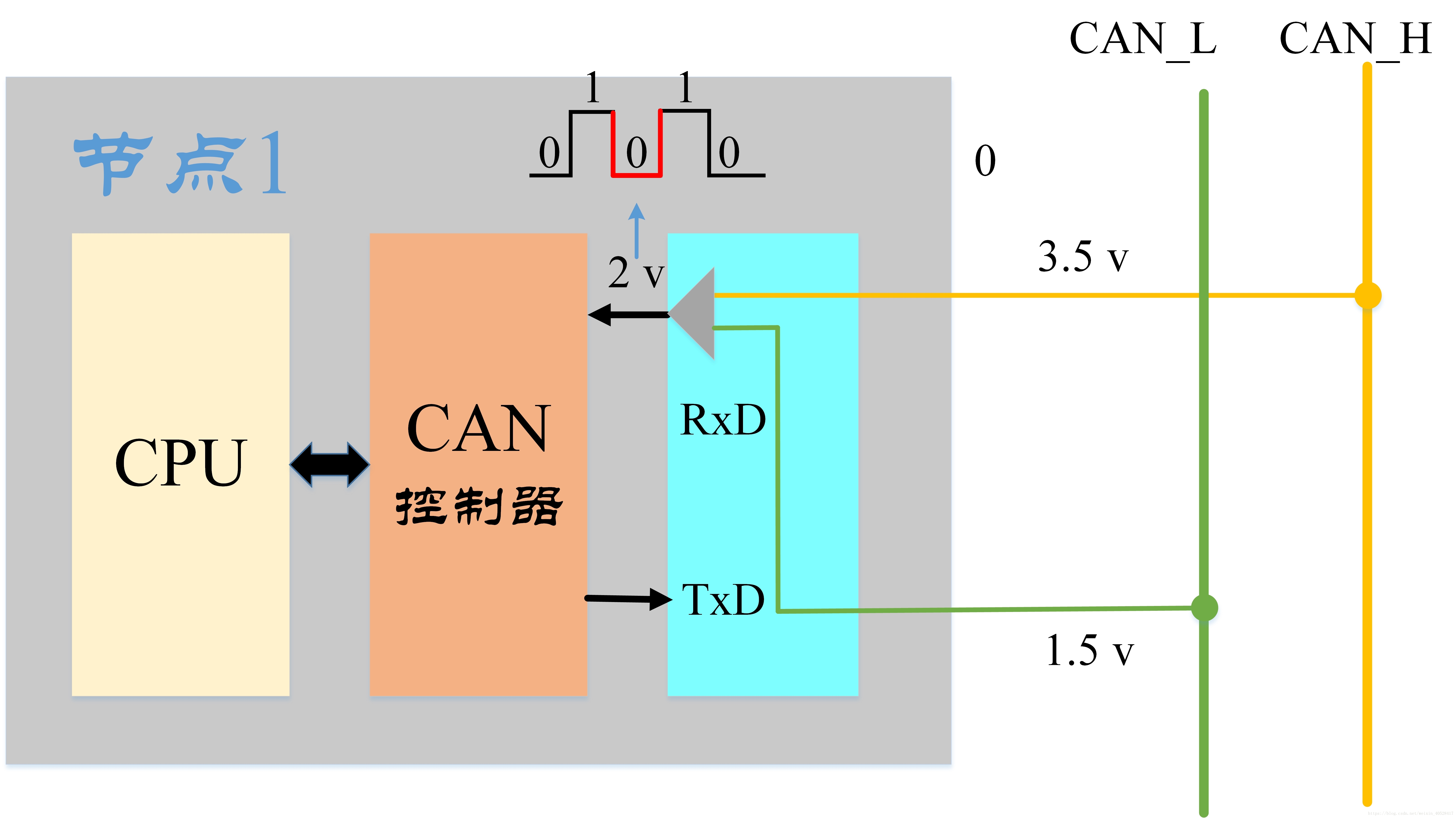
CAN_High
CAN_Low
最后更新:2022-03-30 10:15:05 手机定位技术交流文章
一、UART
UART是一个非同步的通用字符串数据总库,以两种方式相互作用,允许全时工作转移和接收。
接口编号 1 (两行)
1.2如何传输

每一个位的含意
一. 启动:发送逻辑 " 0 " 信号,表示传输字符的启动。
二. 数据位数 : 紧接在初始正对数之后。 位数可能为 4 、 5 、 6 、 7 、 8 等, 并形成字符 。 通常使用 ASCII 代码 。 开始从最低点顺时针传输 。
三. Odd 检查器: 将此位数附加到信息位置上, 使“ 1” 中的位数是偶数( 偶数检查) 或奇数( 奇数检查), 以确保传送的信息准确 。
四. stop 位 : 这是字符数据的结尾指示。 它可能是 1 位, 1 位。 5位数, 2位数高空 。
五. 空格:在逻辑“ 1” 状态中,表示当前行没有发送任何信息。
什么叫做异步通讯?
非同步通信表明,通信中两个字符(8比特)之间的时间间隔不规则,但为每个参与者设定了字符内的时间间隔。
1.3波特率
港口利率通常以每秒位数表示。这是二进制比特每秒。因为一个字节由八个字节组成波特的速率定义为0或1值的一秒钟传输。如果波特费率为9600,则传送0或1所需的时间为1/9600秒。字节通常用于代表 ASCII 代码。比如一个英文字母,因此:9 600个港到港信托,根据这个想法,每秒9 200/8封信中可能发送的数据数量。长1200字节大约1.2KB。19200等于每秒2 400字节。
二、SPI
SPI是一个全时短程单设备通信协议,与UART不同,它是一个同步通信协议,连接的主要方式是SPI连接的基本方法之一。
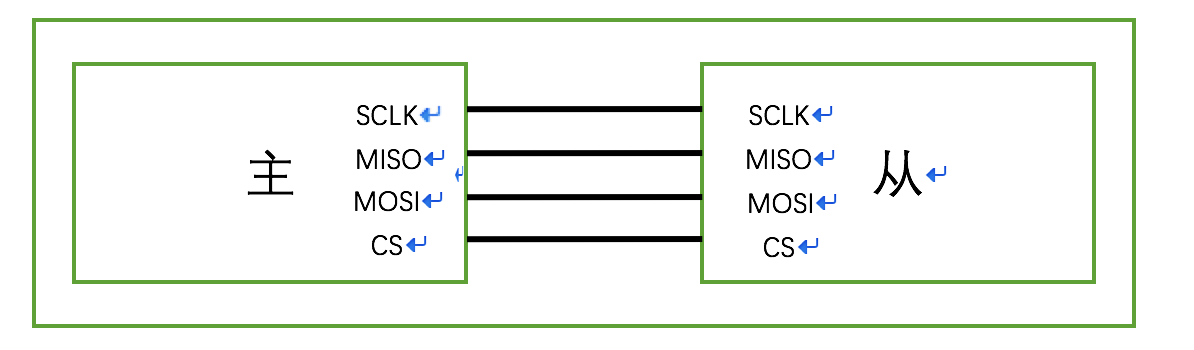
接口二号(四行)
同时,在SPI公共汽车上可以有一个以上的操作员,但只能有一个主机,主机通过视频选择决定通信频道。这需要机器MISO嘴部的三州特征,因此当设备未被选中时,口腔线非常耐受。
2.2如何传输
下列任务在SPI时钟周期内执行:
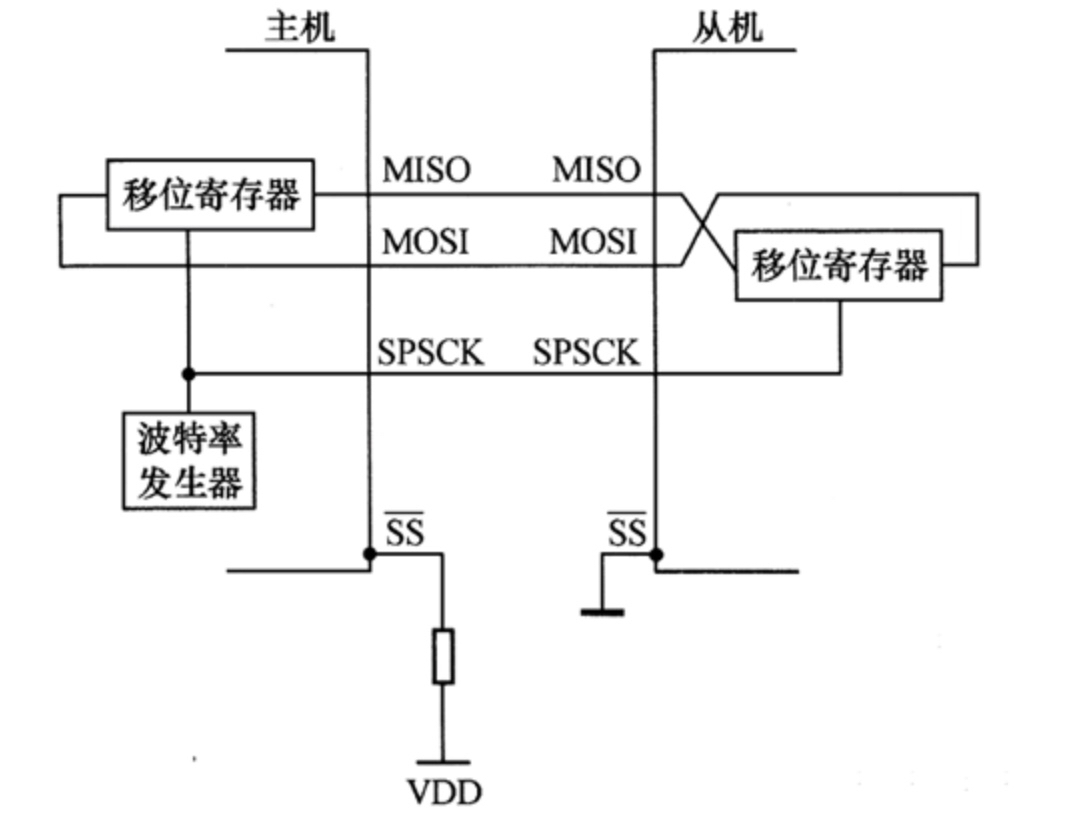
这项工作是通过更换登记册来实现的。主机上有移动登记簿 每一个都有且二者连接成环。随着时钟脉冲,数据从主机传送到服务器 以高低速度。下一步按此顺序转到服务器和主机登记册 。在删除所有注册内容后,等于完成交换两个发报机的内装物。
三、I2C
I2C是一种半双重工作协议(一种半双重工作交流方式,在这种交流中,接收方只能倾听,在发送方发送数据时不能传输数据)。
三.1(两行)接口
3.2如何传输
传输格式:
应答响应:
四、CAN
CAN是用于实时应用的系列通信协议公共汽车,可以使用双重扼杀手段传递信息,是世界上使用最广泛的现场公共汽车之一。
CAN 通讯系列 -- -- CAN 通讯简讯简介1:禁化
接口编号 4 (两行)
4.2如何传输
发送过程:
CAN控制器将CPU信号转换为逻辑级别(0或1),CAN发射器获得逻辑级别并将其转换为差异级别,然后将其出口到CAN总机交换控制器,将CPU信号转换为逻辑级别(0或1),CAN发射器获得逻辑级别并将其转换为差异级别,然后出口到CAN总机。
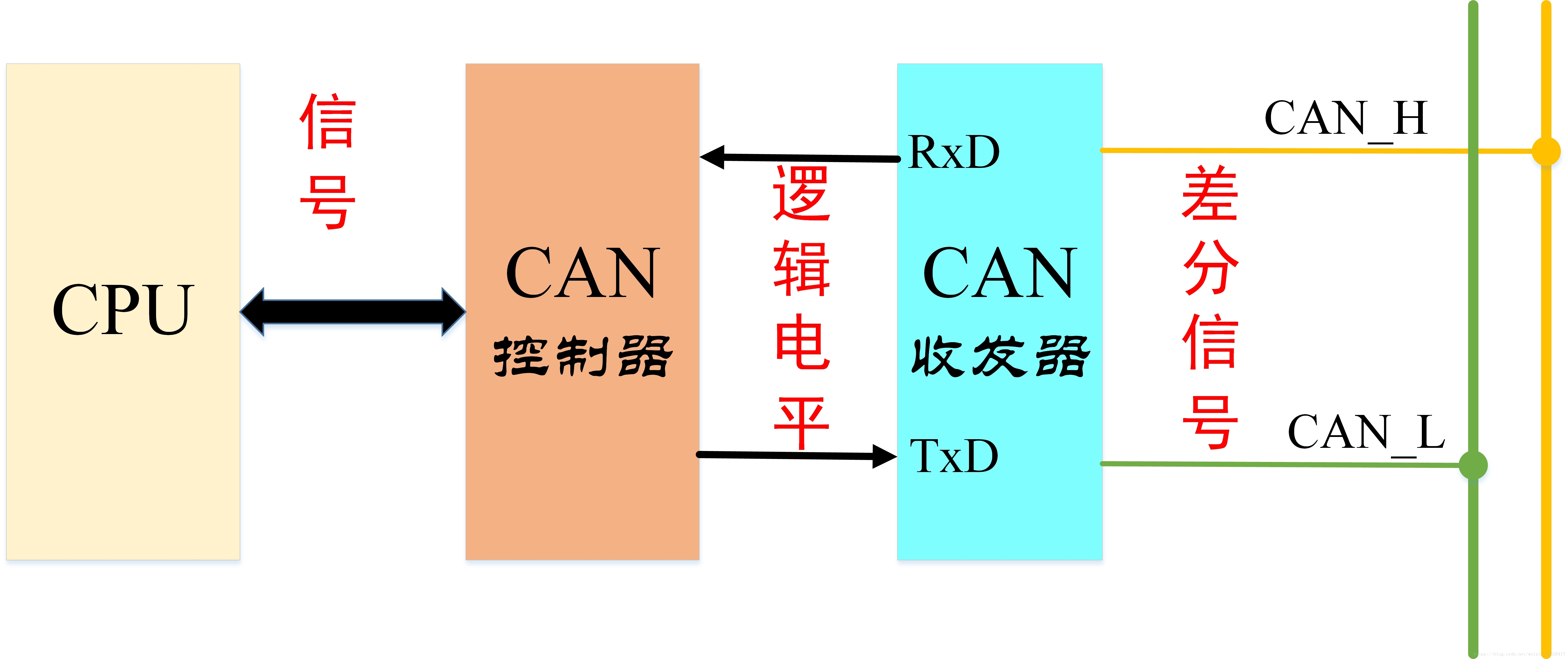
接收过程:
CAN接收器将CAN_H线和CAN_L线的差值转换为逻辑水平,发送到CAN控制器,后者随后发送到CPU。
接口RS232、RS485、RS422和RJ45。
本文由 在线网速测试 整理编辑,转载请注明出处。

