STM32 CubeMax 编码器电机测速 原理与实现
最后更新:2022-04-17 22:39:38 手机定位技术交流文章
编码器电机测速
有些链接:https://blog.com/I'm sorry, csdn。这篇文章是我们2011年埃及抗议特别报导的一部分。 net/lzzm/article/details/119416134。
在图画水印上可找到更多参考文献。
一. 编码器类型和原则
有两种编码器:光电编码器和大厅编码器。
1.1 光电编码器
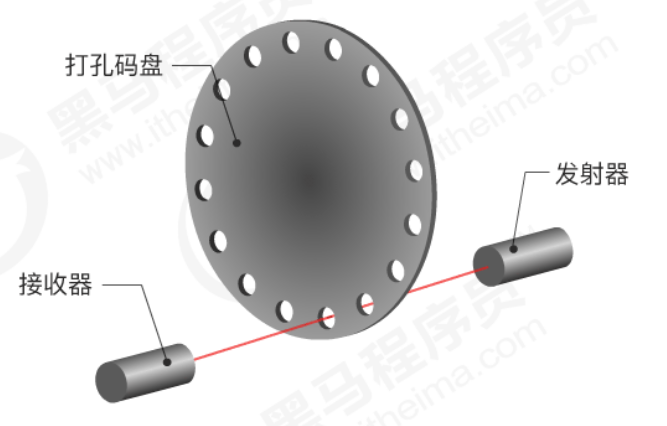
如所示,一个穿孔板与电动机一起旋转。当光线穿过圆圈时,输出水平的变化、产生单波和单波的频率都受到监测,以确定发动机的速度。
1.2 霍尔编码器
电源现在基本上是一个大厅编码器。
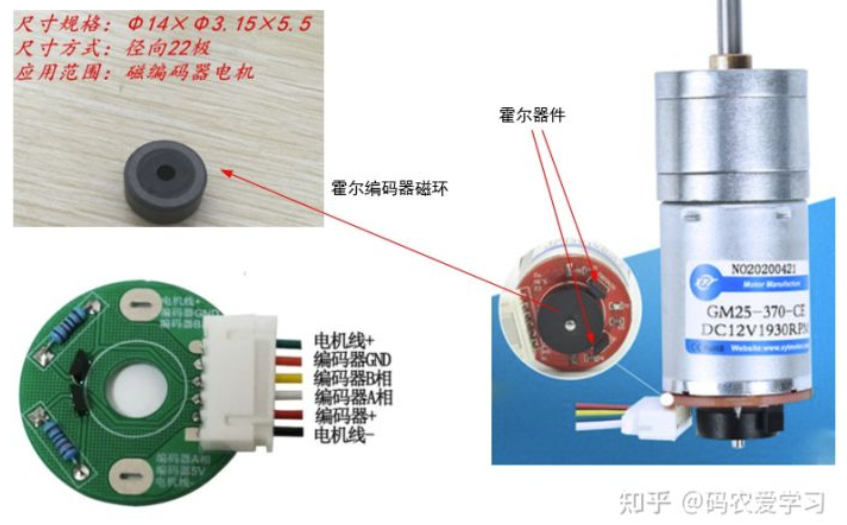
霍尔的编码器磁盘随磁极散开,随着磁盘随发动机主轴而行,在两条电路之间形成90度半径,可以监测发动机的传输和方向。
2. 常用测速方法
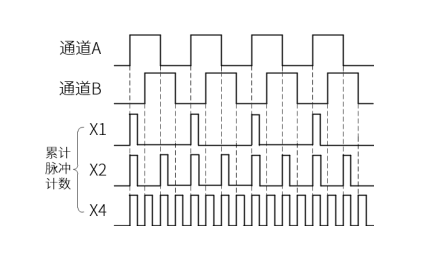
2.1 倍频技术
如果沿A-B-沿上往下计算一个频率, 沿着A-沿上往下计算两个频率, 沿着A-B-沿A-沿上往下测量四个频率, 大厅编码器将输出双向波信号。
使用几个频率可以提高速度测量的灵敏度,最大限度地使用双向信号,使用几个频率可以提高速度测量的灵敏度,最大限度地使用双向信号。
我们在这里讨论的三个速度计 只是软件计算的差异; 硬件没有差异。
2.1 M法测速
M-速度(又称周期性测量)是特定时间段的脉冲,速度根据电路产生的脉冲编号确定。
设定旋转速度为n.r/s,时间为n.r/s。
T
0
T_0
T
0
,s;
T
0
T_0
T
0
时间内的脉冲数为
M
0
M_0
M
0
; C 是发动机在一个圆圈内产生的脉冲数; C 是速度计算公式。
n
=
M
0
C
T
0
n=frac{M_0}{CT_0}
n
=
C
T
0
M
0
当
M
0
M_0
M
0
它是巨大的,迅速的, 而且相当准确和稳定, 但是当..
M
0
M_0
M
0
很小,速度有变化
M
0
M_0
M
0
差异很小,这意味着以慢速估计的不准确程度相当高,这就是M的速度适用于高速局势的原因。
2.2 T法测速
T速度(又称频率测量)最初用于产生固定和已知的高频脉冲。当编码器读取一个信号时,我们开始计算高频脉冲当编码器发出第二个信号时,停止计数。根据高频脉冲数量、高频脉冲频率以及机器载运编码器产生的脉冲数量。
设定旋转速度为 n.r/s,脉冲间隔为 n.r/s。 T E T_E T E s; 电路产生脉冲C; F 0 F_0 F 0 Hertz 编码器输出脉冲的频率; M 1 M_1 M 1 高频脉冲的轮调计算公式是:
n
=
1
C
T
E
=
F
0
C
M
1
n=frac{1}{CT_E}=frac{F_0}{CM_1}
n
=
C
T
E
1
=
C
M
1
F
0
其中
T
E
T_E
T
E
、
M
1
M_1
M
1
,
F
0
F_0
F
0
有如下关系
T
E
=
M
1
F
0
T_E=frac{M_1}{F_0}
T
E
=
F
0
M
1
理解:
C
T
E
CT_E
C
T
E
引擎以当前速度旋转圆圈所需的时间, 或者将一圈分成两圈所需的时间 。
当 T E T_E T E 当转换速度非常大或非常慢,但当.. T E T_E T E 很小,动作很快,速度有变化 T E T_E T E 调整是微小的,但计算不准确的程度很大,因此T速度适用于低速情况。
2.33 M/T速度
M/T结合了M和T方法的好处,计算了以下公式:
n = F 0 M 0 C M 1 n=frac{F_0M_0}{CM_1} n = C M 1 F 0 M 0
理解:公式中只有 M 0 M_0 M 0 ( T 0 T_0 T 0 时间内的脉冲数)、 M 1 M_1 M 1 (高频脉冲计)是一个变量。如果转弯很快, M 1 M_1 M 1 变小, M 0 M_0 M 0 体积更大,相当于M;轮作缓慢时, M 1 M_1 M 1 变大, M 0 M_0 M 0 变小,相当于T法。
三. STM32加速编码器。
3.01 CubeMax 配置
我们需要三个速度测量计时器:一个用于输出 PWM 控制功率,两个用于编码器输入速度测量,三个小时用于确定每个速度的时间间隔。
具体配置如下:
TIM2: 编码器输入的计时器 。
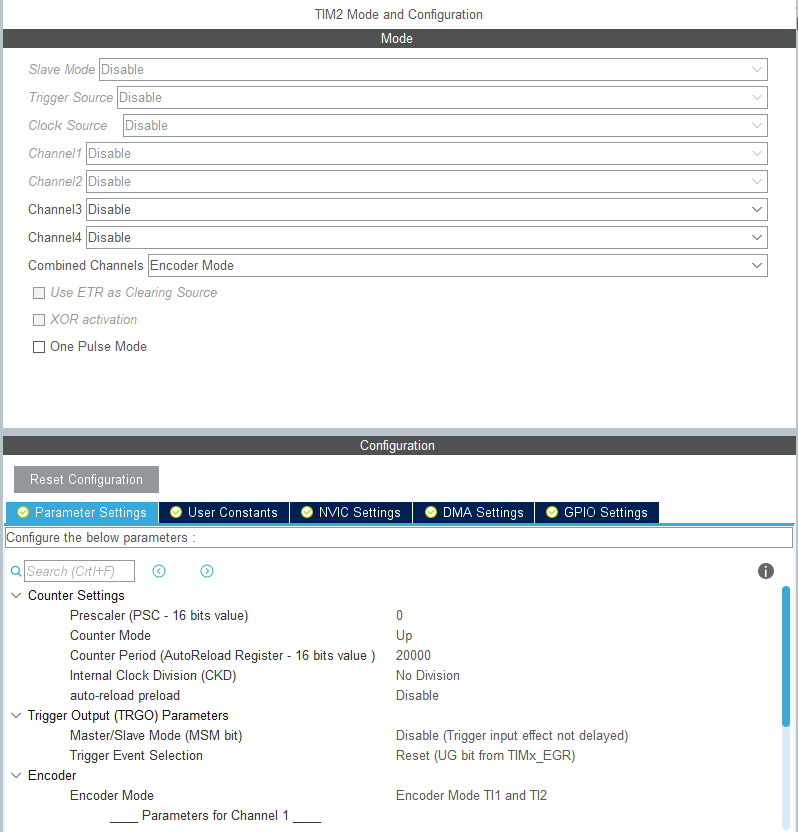
这里有两个频道,频率是上述多频技术的四倍。
随着编码器脉冲的到来,计时器会相应增减,增减和反转,溢出并达到另一个极端数,例如当向上计数达到201时为零。
PWM 输出计时器 TIM3
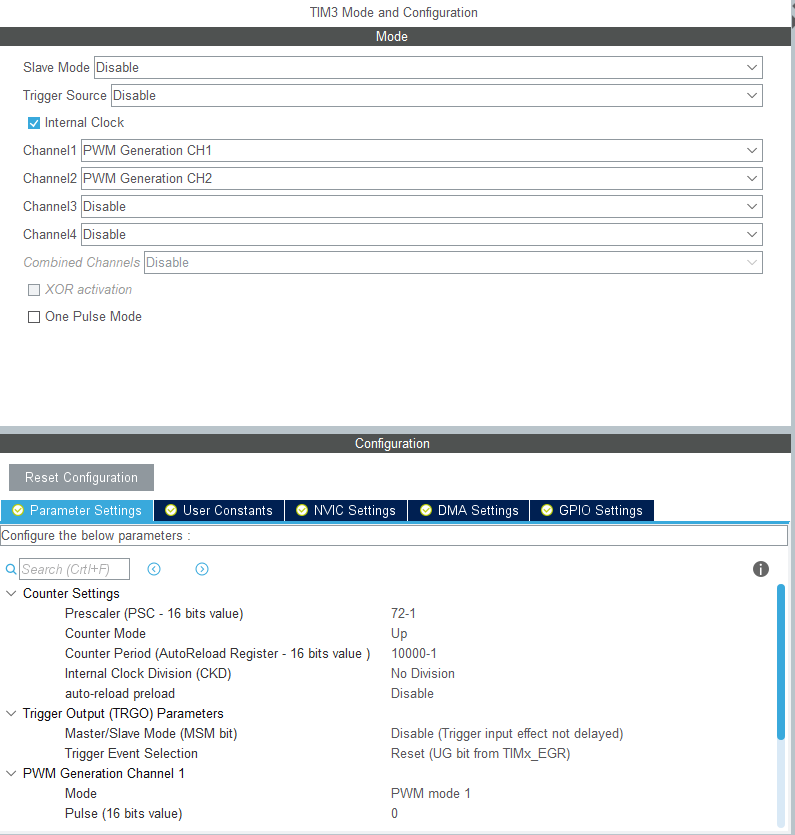
将启动时的 PWM 频率设定为 100Hz 。
TIM4是一个间隔计时器。
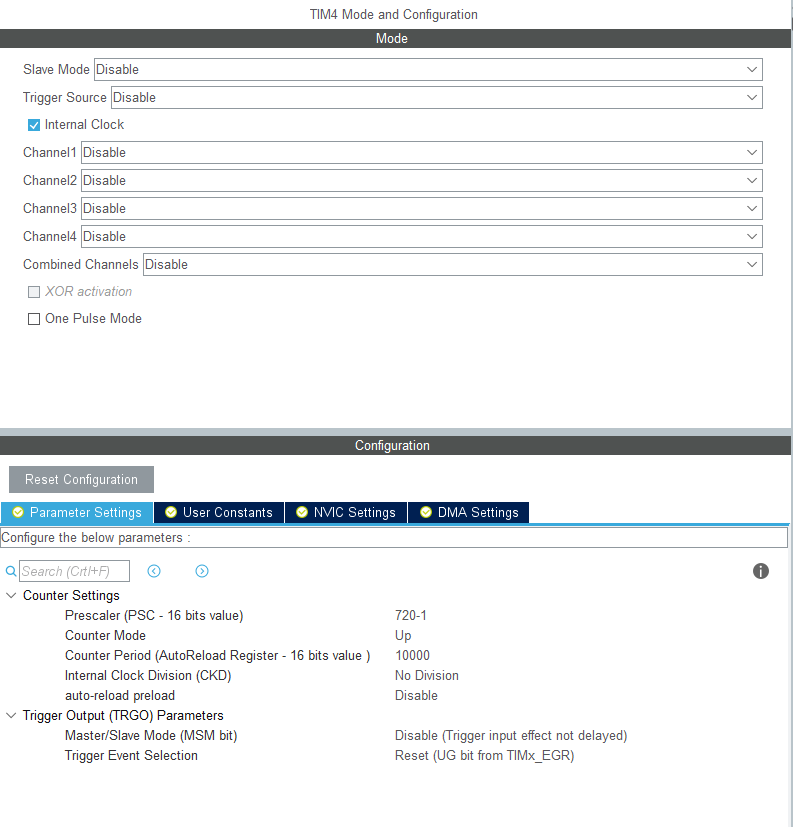
设定 10 Hz, 1 以计算 10 速度值 。
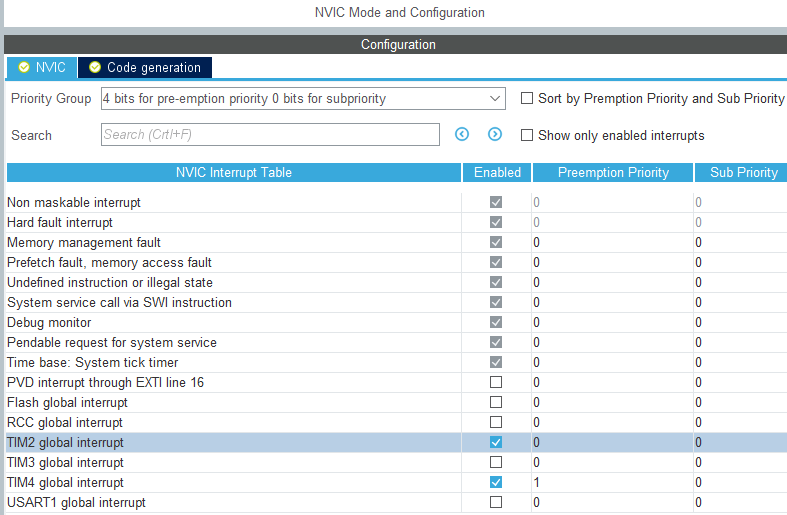
最后,启用断开, 并确保计时器的断开优先级大于计时器的断开优先级, 且断开时间不用于编码器输入 。
不再使用其他基建配置 。
3.2 接线
电动驱动器(此处为L298n)、STM32和电力供应(可能是12V电池)如下:
| 编码器电机 | 电机驱动 | STM32 | 电机驱动供电 |
|---|---|---|---|
| VM | VCC | ||
| VDD | PWM1 | PA6 | |
| VSS | PWM2 | PA7 | |
| 3V3 | 3V3 | ||
| GND | GND | GND | GND |
| 编码器通道1 | PA0 | ||
| 编码器通道2 | PA1 |
3.3 代码编写
对不起,编码器,H的内容
请接受我的歉意 编码器
这是一个四步M技术。如果您想要使用 T 方法, 您必须调整算法 。 此方法稍后会写入 。
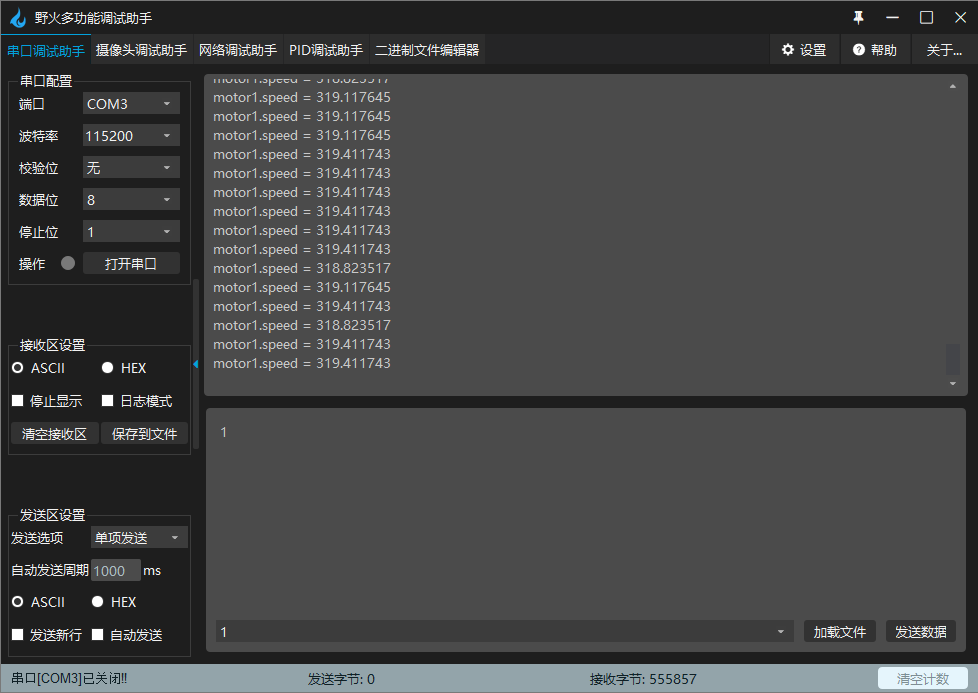
3.4 结果
通过将观测速度导出到序列端口,您现在可以观看实时传输的电源。
本文由 在线网速测试 整理编辑,转载请注明出处。

