电力-RTU终端ModBus规约(C程序)
最后更新:2022-04-19 04:49:32 手机定位技术交流文章
目录:
一、利用摩布斯奴隶和摩布斯民调指示。
二. 摩布客议定书C方法模型
----------------------------------------------------------------------------------------------------------
一、利用摩布斯奴隶和摩布斯民调指示。
1、使用环境:
Windows 7/Windows 10 32/64-位系统
虚拟com 港口工具民用保安港口
-------------------------------------------------------
注意:最新的项目开发是根据摩德布斯议定书进行的。由于与协定发生接触,利用第三方方案利用模式民调和奴隶来调试。这里有一个简单的使用日志。据认为,它将使今后需要帮助的其他人受益。
-------------------------------------------------------
3. 摩布斯民调和奴隶是发展摩布斯和排除麻烦的有用工具。执行模式调试非常简单。这是来自机器模拟应用的神奇的 Modbus 主机/机器模拟应用。照片来自Flickr用户pic.有些计算机缺乏通信港口公用设施,或需要两台计算机在线校准。您可以使用此工具在机器上生成两个 com 端口 。电脑被调试了
以下是cvps9. 0 工具的虚拟界面的例子:
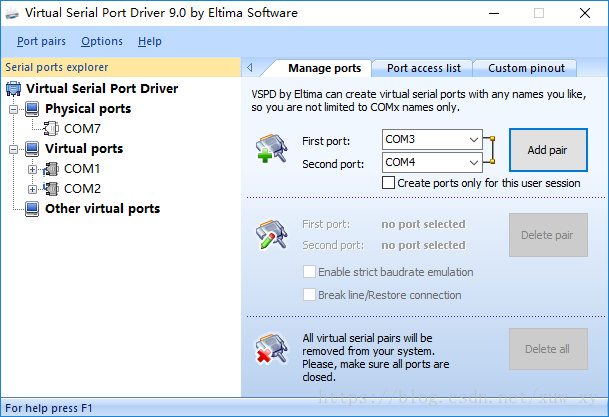
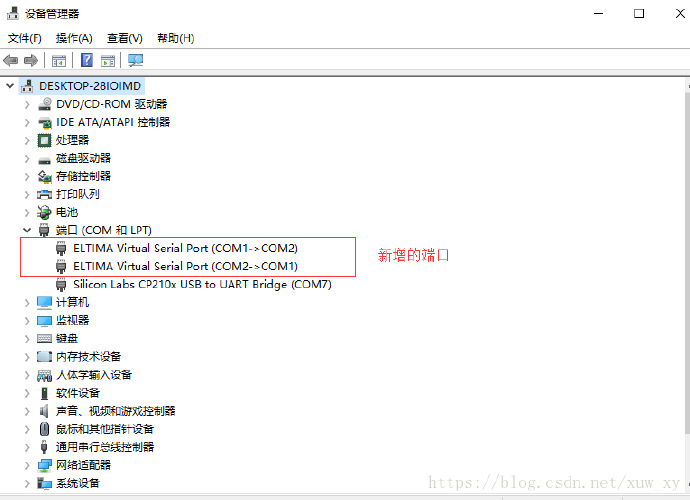
一次可以添加两个端口,我添加了com1和com2两个端口。在电脑设备管理器->端口中查看是否新加了两个端口:
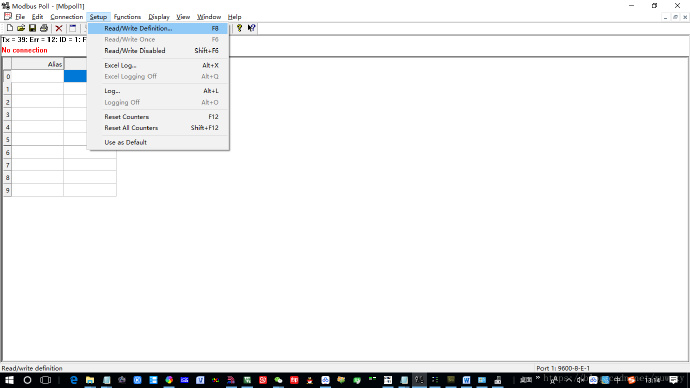
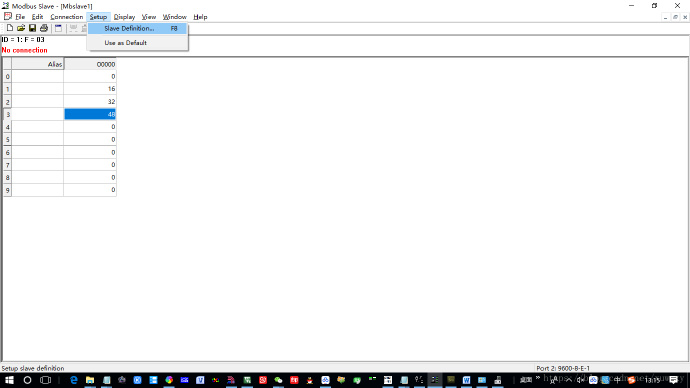
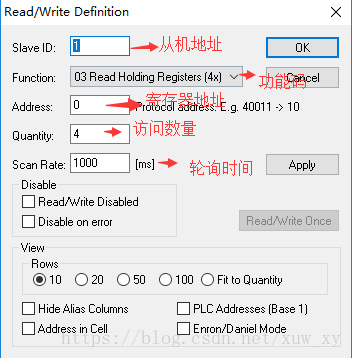
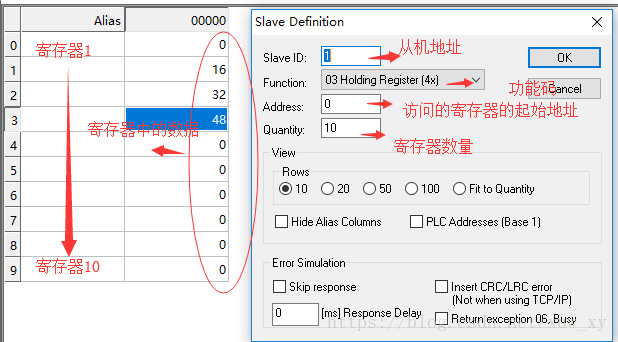
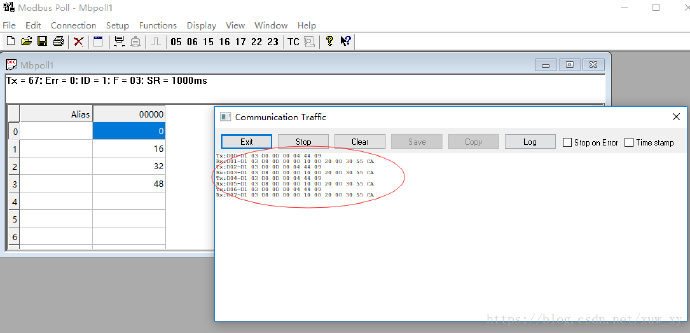
另一方面,必须访问已经安装的摩布斯民调和摩布斯奴隶软件。分别按“F8”或者点击setup->read/write(主机)/slave(从机)definition配置主从端的相关配置,如图:
-------------------------------------------------------
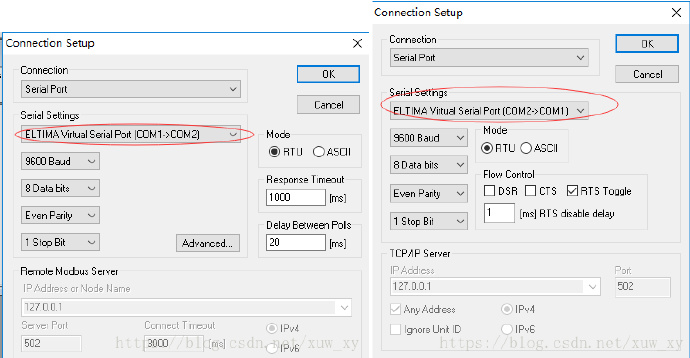
5. 下单击“F3”或“公约”,然后“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”和“F3”以及“F3”和“F3”和“F3”和“F3”和“F3”特别注意改变连接界面的端口。主机从计算机中选择了我们的虚拟 com1 和 com2 端口 。因为事实上我只使用了TRU模式因此,有替代解决办法,如波特9,600和Bit 8。校验位1,不平等的缺失可以无限期地维持下去。然后点击确认它有链接。如果您不链接到成功窗口的第二行, 您将会提供提示 。
6. TX = 11, Err = 0, ID = 1, F = 03, SR = 100 毫秒。 这意味着发送了11个指令,0个错误,来自机器 ID, 函数 03, 响应时间为 1 00毫秒。
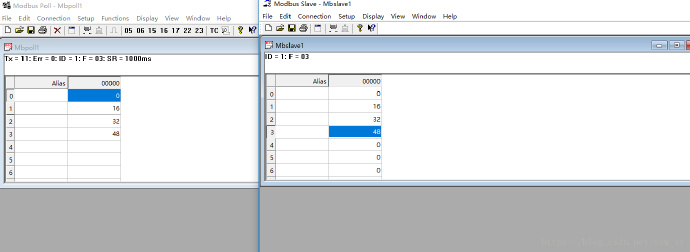
您可以查看工具栏中使用“社区贸易”按钮传输和接收的数据,具体如下:
7, Modbus Slave, Modbus民调,和虚拟系列港口司机 9.0 虚拟港口工具箱购置:寻找100度网络磁盘上的Modbus调试工具。
----------------------------------------------------------------------------------------------------------
二. 摩布客议定书C方法模型
/Mdbus 485通信协议C技术已经更新,供该项目使用,如果熟悉,可部分修改参数用于485件通信相关物品。
//搜索百度网盘“语言(更多信息)”。
#include "main.h"
/字词地址0至255(仅向下8个位置)
//bit 地址 0 到 255 (仅向下 8 位)
const uint8 code auchCRCHi[] = {
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40,
0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1,
0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,
0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,
0x80, 0x41, 0x00, 0xC1, 0x81, 0x40
} ;
const uint8 code auchCRCLo[] = {
0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06,
0x07, 0xC7, 0x05, 0xC5, 0xC4, 0x04, 0xCC, 0x0C, 0x0D, 0xCD,
0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,
0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A,
0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4,
0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,
0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3,
0xF2, 0x32, 0x36, 0xF6, 0xF7, 0x37, 0xF5, 0x35, 0x34, 0xF4,
0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,
0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29,
0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED,
0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,
0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60,
0x61, 0xA1, 0x63, 0xA3, 0xA2, 0x62, 0x66, 0xA6, 0xA7, 0x67,
0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,
0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68,
0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E,
0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,
0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71,
0x70, 0xB0, 0x50, 0x90, 0x91, 0x51, 0x93, 0x53, 0x52, 0x92,
0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,
0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B,
0x99, 0x59, 0x58, 0x98, 0x88, 0x48, 0x49, 0x89, 0x4B, 0x8B,
0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,
0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42,
0x43, 0x83, 0x41, 0x81, 0x80, 0x40
} ;
辛特8 测试油; / / 地址1 用于测试。
viint16 测试登记; / 用于地址 16 测试
Vint8 本地Addr = 1; / / 特定机器控制面板的地址
发送 Count Vint8; / 序列字节
unit8 receCount; / 序列字节数
Vint8 发送波西; / / 发送位置
(五月八日 *puchMsg, viint16 us Datalen)
{
= 0xFF;/ 启动《儿童权利公约》高专字节
= 0xFF; / / 启动低CRC字节的初始化
CRC 通告索引 viint32 uIndex
何时( usDataLen --) // 信件缓冲传输
{
uIndex = uchCRChi *puchMsg++;//CRC计算
uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex] ;
uchCRCLo = auchCRCLo[uIndex] ;
}
return (uchCRCHi << 8 | uchCRCLo) ;
}//uint16 crc16(uint8 *puchMsg, uint16 usDataLen)
/ / / 连续发送数据
{
b485Send = 1; / 发送
sendPosi = 0;
if(sendCount > 1)
sendCount--;
ACC = sendBuf[0];
TB8 = P;
SBUF = sendBuf[0];
}//void beginSend(void)
无效的 readCoil( 撤销) / / / 检查循环状态 。
{
uint8 addr;
uint8 tempAddr;
uint8 byteCount;
uint8 bitCount;
uint16 crcData;
uint8 position;
uint8 i,k;
uint8 result;
uint16 tempData;
uint8 exit = 0;
//addr = (receBuf[2]<<8) + receBuf[3];
//tempAddr = addr & 0xfff;
addr = receBuf[3];
tempAddr = addr;
//bitCount = (receBuf[4]<<8) + receBuf[5]; //读取的位个数
bitCount = receBuf[5];
byteCount = bitCount 除以 8; / 字节
if(bitCount%8 != 0)
byteCount++;
(k = 0; k 小于 BitCount; k++)
{//字节位置
position = k + 3;
sendBuf[position] = 0;
for(i=0;i<8;i++)
{
getCoilVal(tempAddr,&tempData);
sendBuf[position] |= tempData << i;
tempAddr++;
if(tempAddr >= addr+bitCount)
{ //读完
exit = 1;
break;
}
}
if(exit == 1)
break;
}
sendBuf[0] = localAddr;
sendBuf[1] = 0x01;
sendBuf[2] = byteCount;
byteCount += 3;
crcData = crc16(sendBuf,byteCount);
sendBuf[byteCount] = crcData >> 8;
byteCount++;
sendBuf[byteCount] = crcData & 0xff;
sendCount = byteCount + 1;
beginSend();
}//void readCoil(void)
无效的 registers( 无效) // / 读以保持( 一个或多个) 登记册 。
{
uint8 addr;
uint8 tempAddr;
uint16 result;
uint16 crcData;
uint8 readCount;
uint8 byteCount;
inint8 finsh; //1 完成 0 错误
uint16 i;
uint16 tempData = 0;
//addr = (receBuf[2]<<8) + receBuf[3];
//tempAddr = addr & 0xfff;
addr = receBuf[3];
tempAddr = addr;
//readCount = (receBuf[4]<<8) + receBuf[5]; //要读取的个数
readCount = receBuf[5];
byteCount = readCount * 2;
(i=0; i 位元Count; i% 2, 临时addr++)
{
getRegisterVal(tempAddr,&tempData);
sendBuf[i+3] = tempData >> 8;
sendBuf[i+4] = tempData & 0xff;
}
sendBuf[0] = localAddr;
sendBuf[1] = 3;
sendBuf[2] = byteCount;
byteCount += 3;
crcData = crc16(sendBuf,byteCount);
sendBuf[byteCount] = crcData >> 8;
byteCount++;
sendBuf[byteCount] = crcData & 0xff;
sendCount = byteCount + 1;
beginSend();
}//void readRegisters(void)
无效力 SingleCoil( 无效) / // 遥控力单圈
{
uint8 addr;
uint8 tempAddr;
uint16 tempData;
uint8 onOff;
uint8 i;
//addr = (receBuf[2]<<8) + receBuf[3];
//tempAddr = addr & 0xfff;
addr = receBuf[3];
tempAddr = addr;
//onOff = (receBuf[4]<<8) + receBuf[5];
onOff = receBuf[4];
//if(onOff == 0xff00)
if(onOff == 0xff)
{ //设为ON
tempData = 1;
}
//else if(onOff == 0x0000)
else if(onOff == 0x00)
{ //设为OFF
tempData = 0;
}
setCoilVal(tempAddr,tempData);
(一 = 0; i 小于 备注; i++)
{
sendBuf[i] = receBuf[i];
}
sendCount = receCount;
beginSend();
}//void forceSingleCoil(void)
// 同时指定多个登记册
{
uint8 addr;
uint8 tempAddr;
uint8 byteCount;
uint8 setCount;
uint16 crcData;
uint16 tempData;
5 int8 finsh; / / 0 - 00 小时错误
uint8 i;
//addr = (receBuf[2]<<8) + receBuf[3];
//tempAddr = addr & 0xfff;
addr = receBuf[3];
tempAddr = addr & 0xff;
//setCount = (receBuf[4]<<8) + receBuf[5];
setCount = receBuf[5];
byteCount = receBuf[6];
(i=0; i 小于设定数; i++, 临时Addr++) 用于 (i=0; i 小于设定数; i++, 临时Addr++)
{
tempData = (receBuf[i*2+7]<<8) + receBuf[i*2+8];
setRegisterVal(tempAddr,tempData);
}
sendBuf[0] = localAddr;
sendBuf[1] = 16;
sendBuf[2] = addr >> 8;
sendBuf[3] = addr & 0xff;
sendBuf[4] = setCount >> 8;
sendBuf[5] = setCount & 0xff;
crcData = crc16(sendBuf,6);
sendBuf[6] = crcData >> 8;
sendBuf[7] = crcData & 0xff;
sendCount = 8;
beginSend();
}//void presetMultipleRegisters(void)
/ 检查Com0Modbus( 撤销) / 检查UART0 进行数据处理
{
uint16 crcData;
uint16 tempData;
if(receCount > 4)
{
switch(receBuf[1])
{
实例1:读取环(16个地点内的读取点)的现状,电子邮件
设想3:读以维持(一个或多个)登记册
实例5:有武力、遥控的单个圈圈
案例6:建立单一登记册。
if(receCount >= 8)
收到整个数据集
接收中断应终止。
if(receBuf[0]==localAddr && checkoutError==0)
{
crcData = crc16(receBuf,6);
if(crcData == receBuf[7]+(receBuf[6]<<8))
{//校验正确
if(receBuf[1] == 1)
/ 读取环(读取在16点内)的状况, 电子邮件
readCoil();
}
else if(receBuf[1] == 3)
读取以保留(一个或多个)登记册
readRegisters();
}
else if(receBuf[1] == 5)
/ 一次连锁强制遥控
forceSingleCoil();
}
else if(receBuf[1] == 6)
/ 创建单一的登记册
//presetSingleRegister();
}
}
}
receCount = 0;
checkoutError = 0;
}
break;
示例 15: // 配置多圈
tempData = receBuf[6];
Temta + = 9; / 数据数
if(receCount >= tempData)
{
if(receBuf[0]==localAddr && checkoutError==0)
{
crcData = crc16(receBuf,tempData-2);
if(crcData == (receBuf[tempData-2]<<8)+ receBuf[tempData-1])
{
(b) / 增强多个圆圈的强度
}
}
receCount = 0;
checkoutError = 0;
}
break;
案例16: //配置可用于计时的各种登记册
tempData = (receBuf[4]<<8) + receBuf[5];
TempData = TemData * 2; / 数据数
tempData += 9;
if(receCount >= tempData)
{
if(receBuf[0]==localAddr && checkoutError==0)
{
crcData = crc16(receBuf,tempData-2);
if(crcData == (receBuf[tempData-2]<<8)+ receBuf[tempData-1])
{
预先设定多个登记册的MultleRegisters (); //按需设定。
}
}
receCount = 0;
checkoutError = 0;
}
break;
default:
break;
}
}
}//void checkComm0(void)
iint16 getCoilVal( Vint16 adr, int16 et16 *tempData) // 重新进入 0 以显示成功 。
{
uint16 result = 0;
uint16 tempAddr;
tempAddr = addr & 0xfff; //只取低8位地址
switch(tempAddr & 0xff)
{
case 0:
break;
case 1:
*tempData = testCoil;
break;
case 2:
break;
case 3:
break;
case 4:
break;
case 5:
break;
case 6:
break;
case 7:
break;
case 8:
break;
case 9:
break;
case 10:
break;
case 11:
break;
case 12:
break;
case 13:
break;
case 14:
break;
case 15:
break;
case 16:
break;
default:
break;
}
return result;
}//uint16 getCoilVal(uint16 addr,uint16 *data)
secCoilVal (int16 addr, int16 textData) / 设定线圈状态返回 0, 如果成功的话 。
{
uint16 result = 0;
uint16 tempAddr;
tempAddr = addr & 0xfff;
switch(tempAddr & 0xff)
{
case 0:
break;
case 1:
testCoil = tempData;
break;
case 2:
break;
case 3:
break;
case 4:
break;
case 5:
break;
case 6:
break;
case 7:
break;
case 8:
break;
case 9:
break;
case 10:
break;
case 11:
break;
case 12:
break;
case 13:
break;
case 14:
break;
case 15:
break;
case 16:
break;
default:
break;
}
return result;
}//uint16 setCoilVal(uint16 addr,uint16 data)
昆特16 得到注册者Val (昆特16 addr, 昆特16 *tempData) / /
{
uint16 result = 0;
uint16 tempAddr;
tempAddr = addr & 0xfff;
switch(tempAddr & 0xff)
{
case 0:
break;
case 1:
break;
case 2:
break;
case 3:
break;
case 4:
break;
case 5:
break;
case 6:
break;
case 7:
break;
case 8:
break;
case 9:
break;
case 10:
break;
case 11:
break;
case 12:
break;
case 13:
break;
case 14:
break;
case 15:
break;
case 16:
*tempData = testRegister;
break;
default:
break;
}
return result;
}//uint16 getRegisterVal(uint16 addr,uint16 &data)
iint16 setRegister Val( Vint16 addr, int16 textData) // 设置注册值返回 0 。
{
uint16 result = 0;
uint16 tempAddr;
tempAddr = addr & 0xfff;
switch(tempAddr & 0xff)
{
case 0:
break;
case 1:
break;
case 2:
break;
case 3:
break;
case 4:
break;
case 5:
break;
case 6:
break;
case 7:
break;
case 8:
break;
case 9:
break;
case 10:
break;
case 11:
break;
case 12:
break;
case 13:
break;
case 14:
break;
case 15:
break;
case 16:
testRegister = tempData;
break;
default:
break;
}
return result;
}//uint8 setRegisterVal(uint16 addr,uint16 data)
----------------------------------------------------------------------------------------------------------
本文由 在线网速测试 整理编辑,转载请注明出处。

